2020-07-12
2020-07-12 328
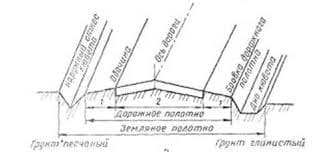
328Он состоит из трех рычагов, прикрепленных посредством карданных шарниров к основанию. Ключевой особенностью является использование параллелограммов в конструкции манипулятора, что позволяет сохранять пространственную ориентацию исполнительного устройства робота. Высокоскоростные роботы этого типа используются для загрузки, подачи и упаковки в фармацевтической промышленности, для сборки и в стерильных помещениях, применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером. [5, 6]

Рисунок 7. Схема дельта-робота. Робот Kawasaki YF003N
К примеру, робот Yaskawa Motoman MPP3H предназначен для комплектации вложений и их упаковки в картонную тару. Чтобы упростить конструкцию, повысить надежность и точность выполнения операций, которая составляет ±0,1 мм, робот MPP3H имеет конфигурацию с параллельно-связанным манипулятором с прямым приводом на оси вращения. Благодаря минимальной площади установки и тому, что он не занимает место непосредственно в самой рабочей зоне, эта модель может быть использована для установки в условиях высокой плотности, обеспечивая большую (до 600 мм) зону обслуживания и способность перемещать груз массой в 3 кг. [5]
Мобильные роботы.
Мобильные роботы (роботы для транспортировки материалов, складирования, обслуживания станков) в настоящее время активно развиваются. Внедрение в них сенсоров и навигационных технологий в сочетании с развитым алгоритмическим обеспечением увеличили их скорость и гибкость применения. Они могут быть интегрированы в другие системы, обладающие возможностью движения, и иметь свою автономную систему навигации. [5]
Например, автономный робот Vecna QC Tugger способен тянуть за собой группу тележек и удерживать грузы. Он работает с большинством пневматических тягово-сцепных соединителей и установлен на такой же автономной платформе, как и вся продуктовая линейка QC Bot, с теми же функциями безопасности, которые позволяют такому роботу автономно двигаться по территории медицинских учреждений и с помощью операторов в других сферах. [5]
Рисунок 8. Мобильный робот Vecna QC Tugger
Глава 2. Обзор дельта-роботов