 2020-07-12
2020-07-12 618
618
Реймонд Клавель (Reymond Clavel) и его команда из лаборатории робототехнических систем в Политехнической школе Лозанны (EPFL – Robotics Systems Laboratory at École Polytechnique Fédérale de Lausanne) начали исследования, которые позволят создать дельта-робота после посещения шоколадной фабрики. Команда Клавеля искала повторяющиеся задачи на работу для роботов, и они обнаружили, что упаковка шоколадного пралине была кандидатом для этого типа высокоскоростной автоматизации с низкой нагрузкой. [7]
В начале 1980-х годов Реймонд Клавель предлагает блестящую идею использования параллелограммов для создания параллельного робота с тремя поступательными степенями свободы и одной вращательной. Клавель называет свое создание роботом Delta, не подозревая, что на рубеже веков он зарекомендует себя как один из самых успешных параллельных роботов с несколькими сотнями активных роботов по всему миру. В 1999 году доктор Клавель получил награду Golden Robot Award, спонсируемую ABB Flexible Automation, за инновационную работу над параллельным роботом Delta. [8]
На рисунке 9 приведена схема дельта-робота из патента US4976582
от 11.12.1990 на «Устройство для перемещения и позиционирования элемента в пространстве». Робот состоит из двух платформ: неподвижно закрепленного верхнего основания (1) и небольшой подвижной платформы (8), соединенных тремя рычагами. Каждый рычаг состоит из двух частей: верхнее плечо (4) жестко соединено с двигателем (3), расположенным на верхнем основании, а нижнее представляет собой параллелограмм (5),
в углах которого установлены так называемые универсальные шарниры
(6, 7), которые позволяют углам изменяться. Каждый параллелограмм соединен с верхним рычагом шарниром (16) таким образом, чтобы его верхняя сторона всегда оставалась перпендикулярной своему рычагу и параллельной плоскости верхнего основания. Благодаря этому подвижная платформа робота, прикреплённая к нижним сторонам параллелограммов, также будет всегда параллельной верхнему основанию. Управлять положением платформы можно, изменяя угол поворота верхних рычагов относительно основания робота при помощи двигателей. В центре нижней платформы (8) крепится рабочий орган робота (9). Это может быть манипулятор, захватывающее устройство или, например, экструдер в случае 3D принтера. Дополнительно может использоваться ещё один двигатель (11), который обеспечивает вращение рабочего органа через штангу (14). [9]

Рисунок 9. Схема дельта-робота (из патента США № 4,976,582)
Таким образом, основная идея разработки параллельного дельта-робота заключается в использовании параллелограммов. Использование трех параллелограммов полностью ограничивает ориентацию мобильной платформы, которая остается только с тремя поступательными степенями свободы. Входные звенья трех параллелограммов установлены на вращающихся рычагах с помощью поворотных соединений. Поворотные соединения вращающихся рычагов приводятся в действие двумя различными способами: с помощью вращательных двигателей (сервопривод постоянного или переменного тока) или с линейными приводами. Наконец, четвертая штанга используется для передачи вращательного движения от основания к конечному рабочему органу, установленному на мобильной платформе. [8]

Рисунок 10. Первый прототип дельта-робота (январь 1986)
Главным преимуществом дельта-роботов является скорость: тяжелые двигатели размещены на неподвижном основании, движутся только рычаги и нижняя платформа, которые стараются изготавливать из легких композитных материалов, уменьшая тем самым их инерцию. [9]
Использование приводов, установленных на основании, и маломассивных соединений позволяет мобильной платформе достигать ускорений до 50 G в экспериментальных условиях и до 12 G в промышленных приложениях. Это делает робота Delta идеальным кандидатом для захвата и размещения легких объектов (от 10 г до 1 кг). [8]
Роботы ABB
В последние 15 лет, промышленный робот ABB IRB 360 FlexPicker был лидером в современной технологии скоростной укладки и упаковки. Робот имеет превосходные показатели по движению с самым коротким временем цикла, точность и высокую грузоподъемность. Программное обеспечение PickMaster было разработано для легкого использования и простой интеграции. [10]
Модельный ряд IRB 360 состоит из 4 моделей. Компактная модель
IRB 360-1/800 имеет рабочую зону диаметром 800 мм. Его небольшая установочная площадь позволяет интегрировать робота в компактные упаковочные машины. [10]
Основные достоинства:
- высокая скорость;
- высокая грузоподъемность – до 8 кг;
- специальный дизайн для промывочных приложений;
- высокие способности по перемещению;
- интегрированная система технического зрения;
- интегрированное управление конвейером.[10]
В таблице 1 приведена спецификация роботов ABB модельного ряда IRB 360. В таблице 2 указано время цикла для данных роботов. Время цикла в таблице 2 измерено в реальных условиях. Однако время цикла может изменяться в зависимости от приложения (инструмента, траектории, активации захвата и т.п.).
Таблица 1. Спецификация роботов ABB IRB 360
| Версии | Грузоподъемность | Радиус действия | Количество осей |
| IRB 360-1/800 | 1 кг | 800 мм | 4 |
| IRB 360-1/1130 | 1 кг | 1130 мм | 3/4 |
| IRB 360-3/1130 | 3 кг | 1130 мм | 3/4 |
| IRB 360-1/1600 | 1 кг | 1600 мм | 4 |
| IRB 360-6/1600 | 6 кг | 1600 мм | 4 |
| IRB 360-8/1130 | 8 кг | 1130 мм | 4 |
Таблица 2. Время цикла роботов ABB IRB 360
| 0.1 кг | 1 кг | 3 кг | 6 кг | 8 кг | |
| 25/305/25 (мм) | |||||
| IRB 360-1/1130 | 0.30 | 0.36 | |||
| IRB 360-3/1130 | 0.40 | 0.40 | 0.52 | ||
| IRB 360-8/1130 | 0.38 | 0.42 | 0.60 | ||
| IRB 360-1/1600 | 0.35 | 0.40 | |||
| IRB 360-6/1600 | 0.43 | 0.48 | 0.60 | ||
| 90/400/90 (мм) | |||||
| IRB 360-1/1130 | 0.44 | 0.51 | |||
| IRB 360-3/1130 | 0.60 | 0.60 | 0.75 | ||
| IRB 360-8/1130 | 0.55 | 0.65 | 0.92 | ||
| IRB 360-1/1600 | 0.50 | 0.54 | |||
| IRB 360-6/1600 | 0.57 | 0.63 | 0.80 |

Рисунок 11. Робот ABB IRB 360-8/1130 (слева) и робот ABB IRB 360-6/1600 (справа)
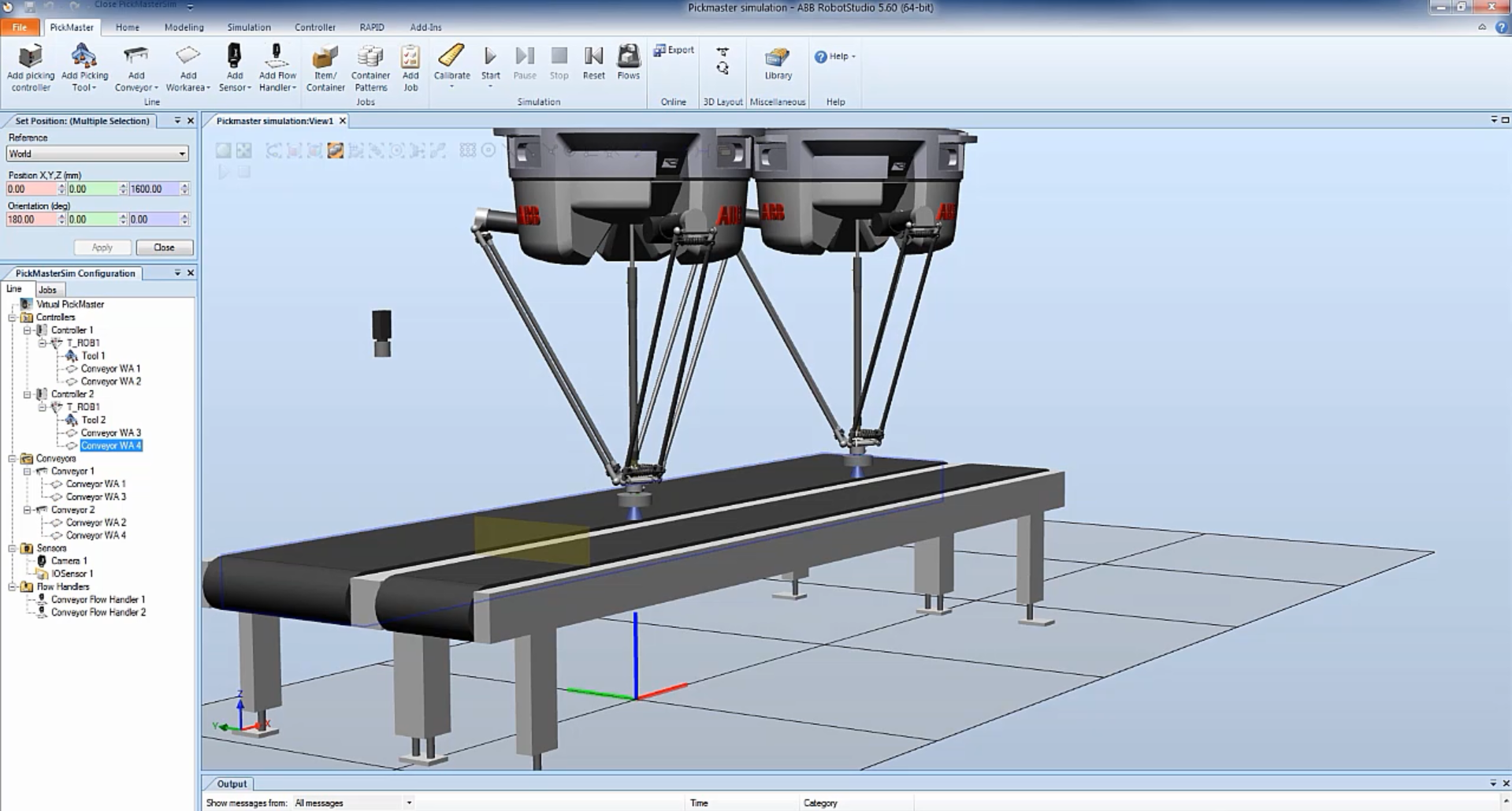
Рисунок 12. Окно программы PickMaster
Роботы FANUC
Дельта-роботы FANUC представлены тремя сериями M-1, M-2 и M-3.
Серия M-1 высокоскоростных сборочных роботов производится в комплектации с 3, 4 или 6 осями и подходит для выполнения широкого спектра задач с максимальной рабочей нагрузкой 1 кг и радиусом действия до 420 мм. Благодаря большому диапазону монтажных положений этих роботов можно непосредственно устанавливать на самое компактное оборудование. Обладая подвижностью, сравнимой с гибкостью человеческой кисти, эти роботы представляют собой альтернативу сложной и дорогостоящей автоматизации механическими средствами. [11]
Серия M-2 была разработана с учетом различных потребностей в площади и предназначена для выполнения целого ряда высокоскоростных операций транспортировки, захвата, упаковывания и перемещения. Роботы доступны в комплектации с тремя или четырьмя осями, обладают грузоподъемностью до шести кг и максимальной досягаемостью 1,13 м. [11]
Роботы серии M-3 доступны в комплектации с 3, 4 или 6 осями и специально разработаны для максимального повышения скорости и гибкости производственного процесса, заключающегося в выполнении высокоскоростных операций перемещения и захвата деталей малого размера, в целом ряде отраслей, включая пищевую, фармацевтическую и электронную промышленность. За счет конструкции с параллельной кинематикой и широкого радиуса рабочей зоны эти роботы являются подходящим решением для автоматизации ответственных процессов, с которыми традиционные последовательные манипуляторы или роботы с кинематической схемой типа SCARA не справляются. [11]
Приложение FANUC ROBOGUIDE выполняет симуляцию как движений робота, так и команд для конкретной сферы применения и обеспечивает экономию времени при создании новых настроек движения. Чтобы гарантировать минимальное влияние на производство, модули можно разрабатывать, тестировать и изменять полностью автономно. Чтобы сократить время на трехмерное моделирование, модели деталей можно импортировать из персонального компьютера в виде данных САПР. Большая библиотека программного обеспечения для симуляции позволяет пользователям выбирать и изменять детали и размеры. Для работы с интуитивно-понятным и чрезвычайно простым в использовании приложением ROBOGUIDE требуется минимальное обучение. Оно также доступно со специализированными инструментальными средствами для конкретных сфер применения. Приложение ROBOGUIDE позволяет предварительно запрограммировать роботов перед установкой в модуль, а также просмотреть и подтвердить траектории перемещения робота перед загрузкой программ в реальный робот. [11]
Таблица 3. Спецификация роботов FANUC серий M-1, M-2 и M-3
| Версии | Грузоподъемность | Радиус действия | Количество осей |
| M-1 i A/0.5A | 0,5-1 кг | 280 мм | 6 |
| M-1 i A/0.5AL | 0,5-1 кг | 420 мм | 6 |
| M-1 i A/0.5S | 0,5-1 кг | 280 мм | 4 |
| M-1 i A/0.5SL | 0,5-1 кг | 420 мм | 4 |
| M-1 i A/1H | 1 кг | 280 мм | 3 |
| M-1 i A/1HL | 1 кг | 420 мм | 3 |
| M-2 i A/3A | 3 кг | 800 мм | 6 |
| M-2 i A/3AL | 3 кг | 1130 мм | 6 |
| M-2 i A/3S | 3 кг | 800 мм | 4 |
| M-2 i A/3SL | 3 кг | 1130 мм | 4 |
| M-2 i A/6H | 6 кг | 800 мм | 3 |
| M-2 i A/6HL | 6 кг | 1130 мм | 3 |
| M-3 i A/12H | 12 кг | 1350 мм | 3 |
| M-3 i A/6H | 6 кг | 1350 мм | 6 |
| M-3 i A/6S | 6-8 кг | 1350 мм | 4 |

Рисунок 13. Робот FANUC M-1 i A/0.5AL (слева), робот FANUC M-2 i A/3S
(в центре) и робот FANUC M-3 i A/12H (справа)
Роботы Kawasaki
Дельта-роботы Kawasaki серии Y могут использоваться для погрузочно-разгрузочных и сборочных работ в различных отраслях промышленности, включая пищевую, фармацевтическую, косметическую, электронную, машинную и солнечные панели. Роботы серии Y способны к высокоскоростному движению в широком диапазоне, что помогает ускорить производственные линии. Серия Y включает две модели: YF003N с грузоподъемностью 3 кг и YF002N с грузоподъемностью 2 кг. Они способны к высокоскоростному движению в широком диапазоне, что помогает ускорить производственные линии. [12]
Таблица 4. Спецификация роботов Kawasaki серии Y
| Версии | Грузоподъемность | Радиус действия | Количество осей |
| YF002N | 2 кг | 600 мм | 4 |
| YF003N | 3 кг | 1300 мм | 4 |

Рисунок 14. Робот Kawasaki YF002N (слева) и робот Kawasaki YF003N (справа)
K-ROSET – это программное обеспечение Kawasaki для автономного моделирования роботов. Этот инструмент позволяет пользователю добавлять 3D-модели роботов Kawasaki, периферийного оборудования, инструментов и деталей роботов в виртуальную среду и создавать рабочие места для автоматизации нескольких роботов. Программное обеспечение эмулирует процессы реального контроллера робота Kawasaki и позволяет пользователю взаимодействовать с трехмерной моделью робота с помощью экранов и кнопок. Пользователь может построить полное трехмерное представление рабочей среды, написать код робота для конкретного приложения, а затем запустить код робота, наблюдая за движением и логикой робота, не выходя из экрана ноутбука. [12]
K-ROSET имеет несколько встроенных инструментов для максимизации эффективности моделирования, таких как обнаружение столкновений, анализ времени цикла и анализ положения установки. Функция обнаружения столкновений предупреждает пользователя, если объекты сталкиваются во время работы программы. Поскольку симуляция обрабатывается виртуальным контроллером робота, инструмент анализа траекторий и времени цикла дает очень точные результаты. Пользователь может вывести видеофайл виртуальной рабочей среды 3D для использования при обзорах дизайна и презентациях по продажам. [12]
Роботы Yaskawa
Дельта-роботы Yaskawa представлены серией MPP. Они шустрые, точные и эффективные, подходят для задач сборки, упаковки, комплектации, сбора и размещения и упаковки. [13]
Набор пакетов специального программного обеспечения и инструментов Yaskawa Motoman позволяет легко контролировать, диагностировать и исправлять различные компоненты роботизированной системы. [13]
Robot Manager – это решение для персонального компьютера на базе Windows для устранения неполадок в работе роботов и устранения неполадок в режиме реального времени. Robot Manager связывается напрямую с контроллером робота с помощью высокоскоростного Ethernet, предоставляя возможность просматривать и редактировать задания робота, операции ввода-вывода и переменные. [13]
Таблица 5. Спецификация роботов Yaskawa серии MPP
| Версии | Грузоподъемность | Радиус действия | Количество осей |
| MPP3S | 3 кг | 800 мм | 4 |
| MPP3H | 3 кг | 1300 мм | 4 |

Рисунок 15. Робот Yaskawa MPP3H (слева) и робот Yaskawa MPP3S (справа)

Рисунок 16. Окно приложения Yaskawa Robot Manager








