2020-07-12
2020-07-12 524
524
При создании дельта-робота требуется решить две задачи.
В первой ситуации известна позиция, в которую необходимо переместить манипулятор робота. Для этого требуется определить величины углов, на которые необходимо повернуть двигатели, связанные с рычагами робота, чтобы установить его в правильное положение для захвата. Процедура определения этих углов называется обратной кинематической задачей. [9]
Во второй ситуации известны углы, на которые повернуты управляющие моторы робота (если используются сервомоторы, то углы легко можно узнать, считав показания с датчиков углов поворота), и требуется найти положение платформы робота в пространстве (например, чтобы скорректировать его позицию). Это – прямая кинематическая задача. [9]
Неподвижное основание робота, и его движущуюся платформу можно представить в виде равносторонних треугольников: на рисунке 22 они закрашены зеленым и розовым цветами соответственно. Углы поворота рычагов робота относительно плоскости основания (они же – углы поворота моторов) обозначены как Ѳ1, Ѳ2 и Ѳ3, а координаты точки Е0, расположенной в центре подвижной платформы и в которой в реальной жизни будет закреплен манипулятор робота – как (x0, y0, z0). [9]
Рисунок 22. Кинематическая схема дельта-робота
Таким образом, обратная кинематическая задача состоит в том, чтобы, зная координаты (x0, y0, z0), получить углы (Ѳ1, Ѳ2, Ѳ3), а прямая кинематическая задача состоит в том, чтобы, зная углы (Ѳ1, Ѳ2, Ѳ3), получить координаты (x0, y0, z0). [9]
Система мониторинга
Схема возможного интерфейса для мониторинга основных параметров робота-манипулятора ДР-1 приведена на рисунке 23.
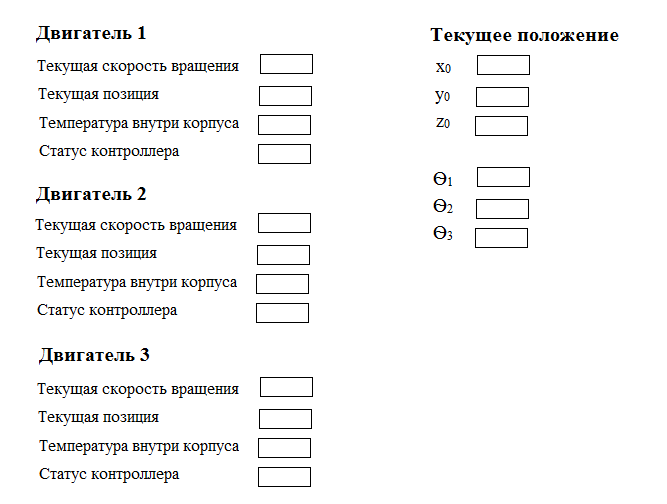
Рисунок 23. Схема интерфейса системы мониторинга
Заключение
Предпосылки к созданию автоматизации промышленных процессов появились достаточно давно. Кроме того, рост объемов промышленного производства, а также потребность в снижении затрат на производство, способствуют дальнейшему активному развитию роботизации в промышленности.
В настоящий момент существует множество разнообразных типов роботов, каждый из которых способен наилучшим образом решить требуемую задачу на производстве.
Однако несмотря на стремительное развитие средств автоматизации в промышленности, ручной труд активно используется на предприятиях в различных областях, что тем самым приводит к необходимости поиска новых инструментов, которые позволят механизировать такие стадии промышленного процесса.
Дельта-роботы являются высокоскоростными промышленными роботами, обладающими высокой точностью и позволяющими решать широкий круг задач на предприятиях в самых различных отраслях, таких как пищевая, фармацевтическая и электронная промышленность. Как правило, дельта-роботы размещаются непосредственно над конвейерной лентой.
В настоящий момент на мировом ранке представлено большое многообразие разнообразных моделей дельта-роботов разных производителей, однако, среди них почти нет российских производителей.
Разрабатываемый в Балтийском федеральном университете имени Иммануила Канта робот-манипулятор ДР-1 обладает требуемыми характеристиками для выполнения поставленных задач и использует подходящие для этих целей двигатели СПШ20-34100. Сервопривод СПШ20-34100 содержит систему управления, которая позволяет осуществлять настройку по более чем 50 параметрам, в целях оптимизации рабочих характеристик привода для решения каждой конкретной задачи. Кроме того, данный сервопривод содержит встроенный программируемый контроллер, позволяющий создавать программы движения привода без применения дополнительных внешних контроллеров.
SCADA – система диспетчерского управления и сбора данных, основными структурными компонентами которой являются удаленный терминал, связанный с объектом управления и осуществляющий управление в режиме реального времени (RTU), диспетчерский пункт управления (MTU), коммуникационная система (каналы связи) (CS). Существует различное программное обеспечение SCADA-систем.
Сервоприводы СПШ20-34100 имеют множество динамических параметров, позволяющих определить текущее состояние.
Рассмотрен простой вариант для мониторинга основных параметров сервоприводов, а также текущего положения углов поворота дельта-робота и расположения манипулятора робота. Возможно, его расширение, например, в части добавления управления текущим положением робота (перемещение манипулятора в заданную точку).
В результате процесса учебной практики были достигнуты следующие результаты:
- Изучены различные типы роботов и сферы их применения;
- Изучены дельта-роботы ведущих мировых производителей;
- Ознакомлена с роботом-манипулятором ДР-1 (дельта-робот № 1), разрабатываемым в Балтийском федеральном университете имени Иммануила Канта;
- Изучены структура и компоненты SCADA-систем;
- Рассмотрены параметры для системы мониторинга робота-манипулятора ДР-1.