 2020-07-12
2020-07-12 545
545
В следящем электроприводе широкое применение находят асинхронные двигатели, которые отличаются надежностью в работе и долговечностью.
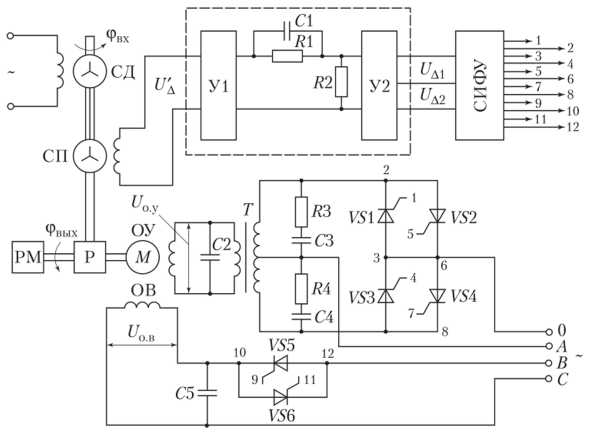
Двигатель имеет обмотки возбуждения ОВ и управления ОУ, которые питаются сдвинутым по фазе на 90° напряжением.
Регулирование скорости двигателя осуществляется изменением действующего значения напряжения на ОУ, которая получает питание от фазы А трехфазной сети переменного тока через тиристоры VS1— VS4.
Обмотка возбуждения ОВ связана с фазами В, С через тиристоры VS5—VS6. Тиристоры VS1—VS6 образуют стандартные схемы регуляторов напряжения переменного тока. Они попарно включены по встречно-параллельной схеме, что обеспечивает протекание тока по обмоткам в оба полупериода питающего напряжения.
Рассогласование между задающей осью и валом электропривода измеряется с помощью сельсинной пары, состоящей из сельсина-датчика СД и сельсина-приемника СП. Положение ротора СД задает входной сигнал, а положение ротора СП определяет угол поворота вала электропривода. Сигнал рассогласования, снимаемый с обмотки статора СП, пропорционален разности углов, а фаза этого напряжения определяется знаком этой разности (ошибки).
Сигнал рассогласования подается на вход фазочувствительного усилителя У. После прохождения через корректирующее звено, состоящее из резисторовRl, R2 и конденсатора С1, сигнал рассогласования усиливается усилителемУ2 и в виде напряжений и поступает на блок управления тиристорами.
Схема работает следующим образом. При появлении сигнала рассогласования ФУ подает импульсы управления на тиристоры VS1, VS2, VS5, VS6. Тиристоры открываются, и на ОУ и
ОВ подаются напряжения Uoy и UO B, которые пропорциональны сигналу рассогласования UM. Двигатель М начинает вращаться, уменьшая угол рассогласования между осями сельсинов СД и СП.
Цифроаналоговый позиционный следящий ЭП постоянного тока.
При необходимости получения высокой точности слежения (до 0,001%) в следящих электроприводах применяются цифровые устройства управления (задатчики, сумматоры, счетчики и т.д.) и датчики координат. В ряде случаев цифровая измерительная часть сочетается с аналоговой, выполненной по принципу подчиненного регулирования координат.
Аналоговая часть электропривода выполнена по структуре подчиненного регулирования координат, в которой внешний контур регулирования положения выполнен цифровым, а внутренние контуры регулирования тока и скорости — аналоговыми.
Аналоговая часть содержит регулятор тока РТ, на который поступают сигналы задания по току U3T и обратной связи по току U0 T, подаваемые соответственно с регулятора скорости PC и датчика тока ДТ. Выходной сигнал регулятора тока Uy является управляющим для реверсивного преобразователя ПУ, питающего якорь двигателя постоянного тока независимого возбуждения М.
Регулятор скоростиPC,в свою очередь, получает сигналы Uoc от датчика скорости (тахогенератора) BR и U3C от задатчика интенсивности ЗИ, входным сигналом которого является выходной сигнал U3 C аналогового регулятора положения РП.
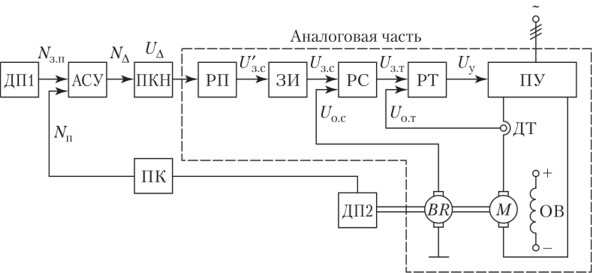
В состав цифровой измерительной части электропривода, формирующей сигнал рассогласования, входят датчики входной ДП1 и выходной ДП2 координат электропривода (его положения), арифметическое суммирующее устройство АСУ, преобразователь кода в напряжение ПКН (преобразователь «код — аналог») и преобразователь кода положения вал а ДПТ в двоичный код ПК.
Работа цифровой части следящего электропривода происходит следующим образом. Требуемое перемещение исполнительного агрегата рабочей машины вырабатывается задатчиком ДП1 в виде числа в двоичном коде. Этот сигнал подается на вход сумматора АСУ вместе с числовым сигналом (также в двоичном коде), соответствующим действительному положению исполнительного органа рабочей машины.
Сумматор АСУ обеспечивает суммирование этих двух цифровых сигналов и выделение сигнала рассогласования (ошибки) в цифровом коде NA. Далее цифровой сигнал с помощью преобразователя ПКН преобразуется в аналоговый сигнал UA (напряжение постоянного тока), который поступает на вход регулятора положенияРП.
Цифроаналоговый следящий электропривод имеет хорошие динамические показатели работы за счет аналоговой части и высокую точность слежения, обеспечиваемую цифровой частью. Элементы и устройства такого электропривода могут быть реализованы на основе унифицированной серии аналоговых (УБСР-АИ) и цифровых (УБСР-ДИ) регуляторов.








