 2020-07-12
2020-07-12 1556
1556Следящий электропривод
Следящим называется электропривод, который обеспечивает (воспроизводит) с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно изменяющимся входным сигналом управления.
Следящий электропривод применяется в металлообрабатывающих станках.
Следящий электропривод состоит из датчика (1) входного сигнала и датчика (5) выходной координаты, измерителя рассогласования 2, системы управления3 и электродвигателя с механической передачей4, которая приводит в движение исполнительный орган 6 рабочей машины.
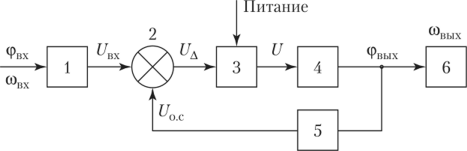
Схема следящего электропривода
Датчики входной и выходной величин преобразуют механические величины (скорость или угол поворота вала) в электрические — входной сигнал Um и сигнал обратной связиUoc. Измеритель рассогласования 2,алгебраически суммируя эти сигналы, вырабатывает сигнал рассогласования UA, поступающий в систему управления3.
Следящий электропривод по своей структуре представляет собой замкнутую систему, действующую по принципу отклонения.
Система управления состоит из регулятора (усилителя) и силового преобразователя, которые обеспечивают необходимое преобразование сигнала рассогласования в напряжение, поступающее на двигатель. Электродвигатель и механическая передача в соответствии с законом изменения U(t)обеспечивают перемещение исполнительного органа 6. Иногда двигатель с механической передачей называют исполнительным механизмом (сервомеханизмом).
Классификация следящего электропривода может быть выполнена по нескольким признакам. Если следящий электропривод предназначен для воспроизведения с заданной точностью скорости движения исполнительного органа, он называется скоростным, а если положения — то позиционным.
Различают следящие электроприводы с непрерывным и прерывным управлением; последние, в свою очередь, делятся на релейные и импульсны е.
В следящих электроприводах непрерывного действиянапряжение, пропорциональное сигналу рассогласования, постоянно подается на двигатель.
Следящий электропривод релейного действия характеризуется тем, что напряжение на двигатель подается только в том случае, когда сигнал рассогласования достигает определенного значения. Поэтому работа релейного следящего электропривода характеризуется определенной зоной нечувствительности по отношению к входному сигналу.
Импульсный следящий электропривод отличается тем, что управляющее воздействие на двигатель подается в виде импульсов напряжения, амплитуда, частота или заполнение которых изменяется в зависимости от сигнала рассогласования. В этих случаях говорят соответственно об амплитудно -, частотно - и широтноимпульсноймодуляции сигнала управления.
В следящем электроприводе используются двигатели переменного и постоянного тока, различные виды усилителей (электро- машинные, магнитные, полупроводниковые, пневматические, гидравлические), датчики скорости и положения и другие аналоговые и цифровые устройства управления.
Схема следящего электропривода с двигателем постоянного тока релейного действия
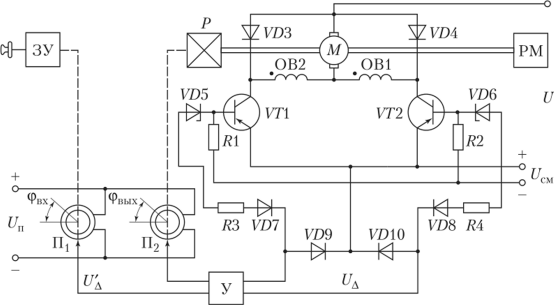
В этой схеме электропривода используется двигатель постоянного тока последовательного возбуждения, имеющий две обмотки возбуждения ОВ1и ОВ2.Управление двигателем осуществляется с помощью силовых транзисторовVT1иVT2. Каждый из транзисторов работает при определенной полярности сигнала согласования, обеспечивая одно из направлений вращения двигателя. Если открыт транзисторVT1, ток проходит по ОВ и двигатель вращается в одном направлении, если же открыт транзистор VT2,ток проходит поОВ1и он вращается в другом направлении. Направление тока якоря в обоих случаях остается неизменным.
Разрядные диодыVD3иVD4служат для снятия перенапряжений, возникающих при отключении обладающих значительной индуктивностью обмоток возбуждения и якоря.
В качестве датчиков входной и выходной величин используются кольцевые потенциометрыП1 иП2, которые образуют потенциометрический измеритель рассогласования.
Движок потенциометраП1(датчика входной величины) связан с выходным валом задающего устройства ЗУ, который представляет собой редуктор с ручным приводом. Движок потенциометраП2(датчика выходной величины) связан с валом редуктора Р, расположенного на валу двигателя и рабочей машины РМ. Редукторы ЗУ и Р имеют одинаковое передаточное число. Питание потенциометров П1 и П2 осуществляется напряжением постоянного тока.
При этом равен нулю сигнала рассогласования на выходе усилителя, оба транзистора закрыты и двигатель неподвижен.
При возникновении угла рассогласования двигатель начнет вращаться, поворачивая вал рабочей машины РМ и ось движка потенциометраП2 в направлении, при котором возникшее рассогласование в системе будет уменьшаться и стремиться к нулю.
Достоинствами следящих электроприводов релейного принципа действия являются их простота, надежность и возможность получения оптимальных траекторий движения исполнительных органов рабочих машин.
К недостаткам таких систем следует отнести их склонность к колебаниям и наличие определенной нечувствительности (неточности) при слежении.

