 2020-07-12
2020-07-12 769
769Процессы, в которых какая-либо физическая величина периодически изменяется во времени, называют колебаниями [16, 21]. Время одного цикла изменений является периодом колебания T, а величина, обратная периоду, – частотой f = 1/ T.
Период колебаний (T) – это интервал времени, который необходим для завершения одного цикла колебания. В зависимости от быстроты колебаний, период измеряют в секундах, миллисекундах, микросекундах и т.д.
Частота колебаний (f = 1/ T) - величина обратная периоду, определяет количество циклов колебания за период и измеряется в герцах (1 Гц=с-1). Для роторных машин частота основного колебания соответствует частоте вращения, измеряемой в оборотах в минуту (об/мин) и определяется как n = f ∙60, где f – частота в Гц, в 1-ой минуте – 60 секунд.
Для описания и измерения механических вибраций используются следующие понятия, приведенные на рисунках 2.2 и 2.3
Максимальная амплитуда (пик ) – это максимальное отклонение от нулевой точки, или от положения равновесия.
Размах (пик – пик) – это разность между амплитудами положительного и отрицательного пиков. Для синусоидального колебания размах в точности равен удвоенной пиковой амплитуде, так как временная реализация в этом случае симметрична. Однако в общем случае это неверно для полигармонического, случайного процессов и их смеси.
Среднеквадратическое значение амплитуды (СКЗ) равно квадратному корню из среднего квадрата амплитуды колебания, т.е. для расчета СКЗ необходимо возвести в квадрат мгновенные значения амплитуды колебаний, и усреднить получившиеся величины по времени. На практике среднеквадратичное значение определяется выражением
 (2.11)
(2.11)
связь СКЗ и среднего значения с пиковым значением определяется зависимостью
 (2.12)
(2.12)
или в общей форме
 (2.13)
(2.13)
где
 – характеристики отклонения формы волн от sin
– характеристики отклонения формы волн от sin
 дБ,
дБ,  3дБ
3дБ
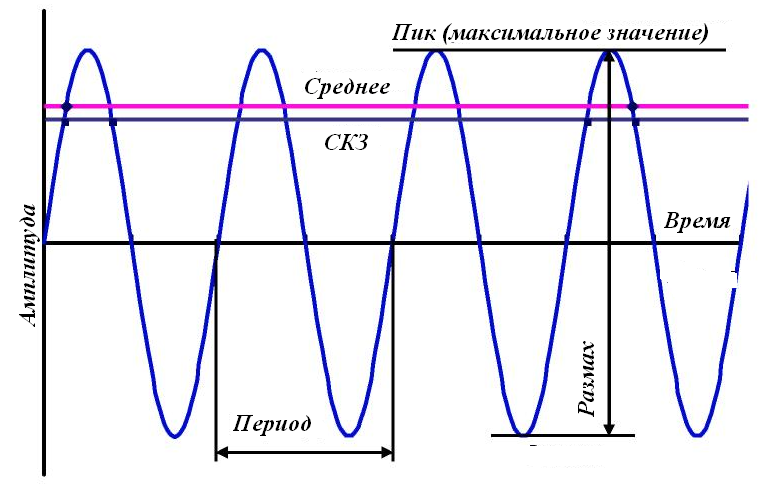
Рис. 2.2. Параметры временной реализации
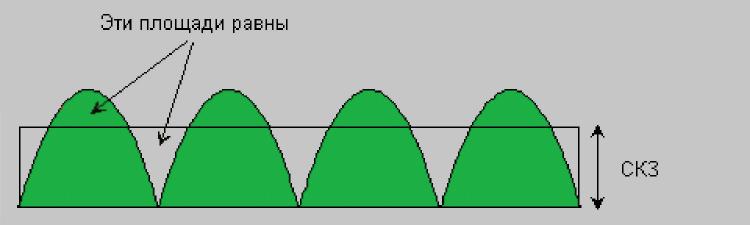
Рис. 2.3 – Среднеквадратическое значение амплитуды
Для получения правильного значения, интервал усреднения должен быть не меньше одного периода колебания. После этого извлекается квадратный корень и получается СКЗ. Для синусоидальной волны (и только для неё) СКЗ в 1,41 раза меньше пикового значения, однако такое соотношение справедливо только для данного случая. По физической природе колеблющейся величины различают колебания механические, электрические и др. Диапазон частот механических колебаний – от инфразвуковых (10-1 Гц) до гиперзвуковых (108 Гц). Самыми простыми из существующих в природе колебательных движений являются упругие прямолинейные колебания тела на пружине (рис. 2.4). При этом простейшая колебательная система (тело, подвешенное на пружине) может быть описана набором параметров - массой тела m (предполагается, что оно не упругое) и коэффициентом жесткости пружины (упругостью пружины) k (предполагается, что она не имеет массы).
При отсутствии сил сопротивления груз, смещенный от положения равновесия на величину x и предоставленный самому себе, будет совершать гармонические колебания по закону
 (2.14)
(2.14)
где x – амплитуда колебания (максимальное S0 смещение от положения равновесия);  – фаза колебания;
– фаза колебания;  - начальная фаза; t – текущее время; ω0 –круговая (угловая) частота, равная
- начальная фаза; t – текущее время; ω0 –круговая (угловая) частота, равная
 (2.15)
(2.15)
где  3,14592653.
3,14592653.
В математике функция синуса описывает зависимость отношения катета к гипотенузе от величины противолежащего угла. Синусоидальная кривая при таком подходе является графиком синуса в зависимости от величины угла. Период T 0 и круговая частота ω0 собственных колебаний простейшей системы без учета сил трения (см. рис. 2.4) определяются величиной массы m и коэффициентом упругости k:
 и
и  (2.16)
(2.16)
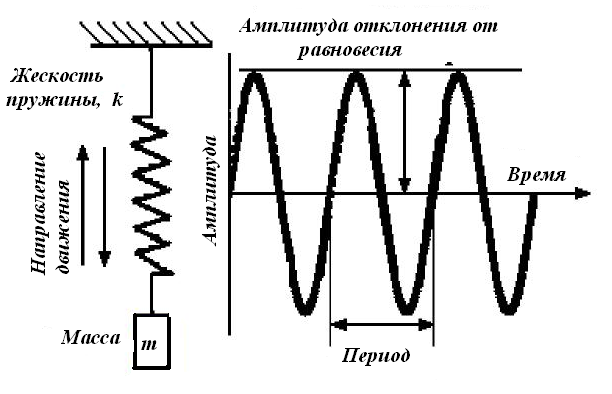
Рис. 2.4. Пример простейшего колебания
Отсюда следует, что с увеличением жесткости пружины увеличивается и собственная частота, а с увеличением массы собственная частота падает.
Такая механическая система имеет одну степень свободы. Если отвести тело на некоторое расстояние от положения равновесия и отпустить, то пружина заставит тело двигаться. Тело приобретет при этом определенную кинетическую энергию, минует точку равновесия и деформирует пружину в противоположном направлении. После этого скорость тела начнет уменьшаться, пока оно не остановится в другой крайней позиции, откуда сжатая или растянутая пружина опять начнет возвращать тело в положение равновесия. Такой процесс будет повторяться, при этом происходит непрерывное перетекание энергии от тела (кинетическая энергия) к пружине (потенциальная энергия) и обратно.
Если бы в системе отсутствовало трение, то эти колебания продолжались бы непрерывно и бесконечно долго с постоянными амплитудой и частотой. Любая реальная механическая система обладает трением (имеет демпфирование), которое приводит к постепенному затуханию амплитуды (см. рис. 2.5) и превращает энергию колебаний в тепло. Движение тела можно описать уравнением:
 (2.16)
(2.16)
где  — коэффициент затухания, зависит от сил вязкости (трения), его величина определяется
— коэффициент затухания, зависит от сил вязкости (трения), его величина определяется  Вместо иногда употребляют величину обратную коэффициенту затухания, которая называется постоянной времени затухания и имеет размерность времени.
Вместо иногда употребляют величину обратную коэффициенту затухания, которая называется постоянной времени затухания и имеет размерность времени.
|
|
Такие колебания называются затухающими. Период затухающих колебаний величина постоянная и не зависит от начальных условий
 (2.17)
(2.17)
Он больше периода собственных колебаний при отсутствии сопротивления
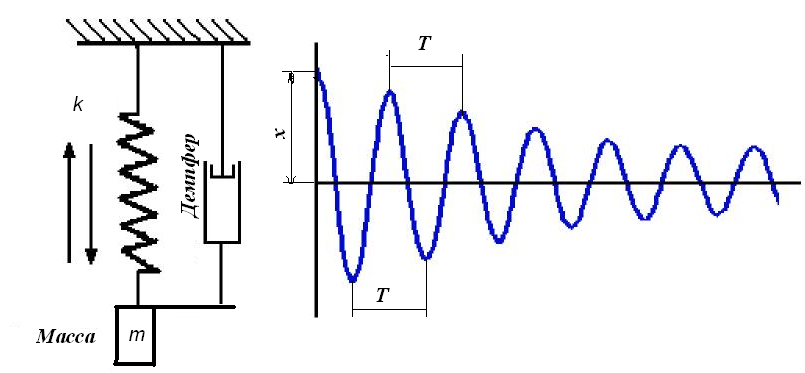
Рис. 2.5 – Затухающие колебания системы с демпфером
(демпфера). Величина изменения периода в первом приближении будет определяться 
Постоянные значения А и  определяются из начальных условий в следующей форме
определяются из начальных условий в следующей форме
 (2.18)
(2.18)
Величина отношения двух последовательных максимумов называют декрементом колебаний 
Натуральный логарифм декремента колебаний называют логарифмическим декрементом колебаний. Он определяется 
Кроме декремента и логарифмического декремента колебаний часто используется другая характеристика затухания — добротность системы  , которая определяется приближенным соотношением
, которая определяется приближенным соотношением  .
.
Любая механическая конструкция может быть представлена в виде системы пружин, масс и демпферов, поглощающих энергию. Масса и пружина образуют систему, которая имеет резонанс на характерной для нее собственной частоте. Если подобной системе сообщить энергию (например, толкнуть массу или оттянуть пружину), то она начнет колебаться с собственной частотой, а амплитуда вибрации будет зависеть от мощности источника энергии и от поглощения этой энергии, т.е. демпфирования, присущего самой системе.
Множество систем пружина—масса—демпфер (т.е. простейших осцилляторов), которыми можно моделировать поведение механической конструкции, называют степенями свободы. Энергия вибраций машины распределяется между этими степенями свободы в зависимости от их собственных частот и демпфирования, а также в зависимости от частоты источника энергии. Поэтому вибрационная энергия никогда не распределена равномерно по всей машине. Например, в машине с электродвигателем главным источником вибраций является остаточный дисбаланс ротора двигателя. Это приводит к заметным уровням вибрации на подшипниках двигателя. Однако если одна из собственных частот машины близка к оборотной частоте ротора, то ее вибрации могут быть велики и на довольно большом удалении от двигателя. Этот факт необходимо учитывать при оценке вибрации машины: точка с максимальным уровнем вибрации не обязательно располагается рядом с источником возбуждения. Колебательная энергия может передаваться на большие расстояния, например, по трубам, и может вызвать большие амплитуды колебаний при встрече с удаленной конструкцией, собственная частота которой близка к частоте возбуждения.
Рассмотрим случай, когда груз (рис. 2.5) находится в положении равновесия и на него начинает действовать периодическая внешняя сила  . По истечении некоторого времени τ 1 (установление колебаний) амплитуда достигнет постоянной величины, которая будет зависеть от свойств системы и внешней силы:
. По истечении некоторого времени τ 1 (установление колебаний) амплитуда достигнет постоянной величины, которая будет зависеть от свойств системы и внешней силы:
 (2.19)
(2.19)
где F max - максимальное значение внешней силы,
ω - круговая частота изменения этой силы
Колебания под действием внешних сил называют вынужденными. Если по истечении времени τ 2 сила перестанет действовать, то колебания превращаются в затухающие. При приближении частоты изменения внешних сил к частоте собственных колебаний в системе наступает резонанс — резкое увеличение амплитуды колебаний.
Рассмотренная простейшая колебательная система имела одну степень свободы (смещение вдоль одной оси координат), сосредоточенные параметры (пружина обладает только упругостью, a груз - массой), сила трения была пропорциональна скорости, в случае вынужденных колебаний действовала одна гармоническая сила. На практике параметры и условия колебаний систем могут быть и более сложными, однако рассмотренные закономерности характерны и для этих случаев.








