2020-08-05
2020-08-05 2849
2849Передний управляемый мост представляет собой поперечную балку, к которой шарнирно закрепляются поворотные цапфы управляемых колес. Крутящий момент к таким мостам не подводится и они поддерживают несущую часть автомобиля и обеспечивают его поворот. Применяются эти мосты на легковых и грузовых автомобилях с колесными формулами 4×2, 6×2 и 6×4.

Рис. 6.5. Передние управляемые мосты: а – с неразрезной балкой; б – с разрезной балкой; 1 – колеса; 2 – поворотная цапфа; 3 – поворотный шкворень; 4 – балка; 5 – рессора; 6 – стойка; 7 – пружина подвески
В зависимости от типа подвески передних колес управляемые мосты могут быть неразрезные и разрезные. Неразрезные управляемые мосты (рис. 6.5, а) устанавливаются на автомобилях с передней зависимой подвеской. В таких мостах колеса непосредственно связаны с балкой и перемещение одного колеса в вертикальном направлении влияет на перемещение другого колеса. При разрезной балке (рис. 6.5, б) управляемые колеса с ней не связаны и их перемещение в вертикальном направлении не зависимо друг от друга.
Передний управляемый неразрезной мост (рис. 6.5, а) представляет собой балку 4 с установленными по концам поворотными цапфами 2. Такие балки изготавливают методом ковки из углеродистых сталей обычно двутаврового сечения. Средняя часть балки выгнута вниз, что позволяет ниже расположить двигатель, понизить центр массы автомобиля, за счет чего повысить его устойчивость. В бобышках балки неподвижно закреплены поворотные шкворни 3, с которыми, в свою очередь, соединены поворотные цапфы 2. На поворотных цапфах на подшипниках устанавливаются ступицы передних колес 1. За счет поворота цапф вокруг шкворней обеспечивается управление автомобилем на поворотах. Соединение моста с несущей частью автомобиля производится с помощью рессор 5.
Конструкция переднего управляемого моста с неразрезной балкой автомобиля МАЗ приведена на рис. 6.6. Балка 5 такого моста кованная из стали с двутавровым сечением с прогибом вниз в средней части. С поворотными цапфами 9 балка соединена поворотными шкворнями 2, имеющими в средней части конусную форму. Шкворни 2 ступенчатого диаметра установлены в вильчатых поворотных цапфах 9 на бронзовых втулках 19 и закреплены гайками. В нижней части обоих поворотных цапф закреплены поворотные рычаги 7 и верхний поворотный рычаг 4 только в левой цапфе. На цапфах на двух роликовых подшипниках 11 и 12 установлены ступицы 8 с тормозными барабанами и колесами. Подшипники колес закреплены с помощью гайки 13, кольца 14, шайбы 15 и контргайки 16. С помощью этих крепежных деталей осуществляется регулировка затяжки пошипников колес.
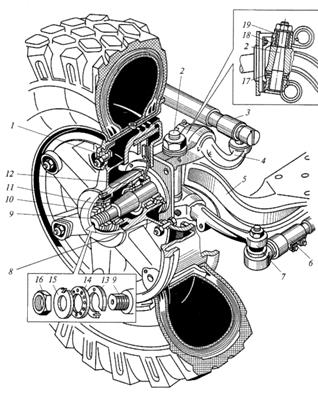
Рис. 6.6. Передний управляемый мост автомобиля МАЗ: 1 – болт; 2 – шкворень; 3, 6 - рулевые тяги; 4, 7 – рычаги; 5 – балка; 8 – ступица; 9 – цапфа; 10 – колпак; 11, 12, 17 подшипники; 13 – гайка; 14 – кольцо; 15 – шайба; 16 – контргайка; 18 – прокладка; 19 - втулка
Передний разрезной мост (рис. 6.5, б) представляет собой балку или поперечину (подрамник) 4 с прикрепленной к ней с обоих сторон подвеской колес 7 и управляемыми колесами 1. Балка или поперечина крепится к кузову автомобиля и предназначена для закрепления на ней двигателя. Установка передних колес может быть шкворневая или бесшкворневая. В первом случае поворот управляемых колес осуществляется вокруг шкворня, во втором случае – вокруг поворотной стойки 6.
На рис. 6.7 приведен передний управляемый мост с разрезной балкой легкового автомобиля с независимой бесшкворневой подвеской. Основной деталью моста является поперечина 4, изготовленная в виде штампосварной конструкции из листовой стали с выгнутой вниз средней частью. К поперечине 4 с помощью верхнего 3 и нижнего 5 рычагов подвески, стоек 2, пружин 6 и амортизаторов 7 подвешены передние управляемые колеса. Весь передний мост в сборе может быть закреплен к кузову автомобиля.
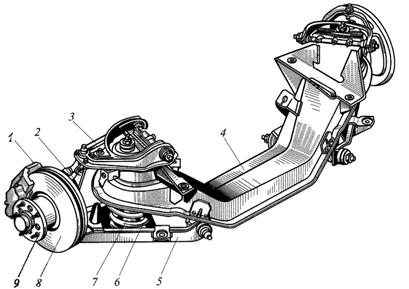
Рис. 6.7. Передний разрезной управляемый мост легкового автомобиля: 1 – суппорт тормоза; 2 – стойка; 3, 5 – рычаги; 4 – поперечина; 6 – пружина; 7 – амортизатор; 8 - тормозной диск; 9 – ступица колеса
Для создания наименьшего сопротивления движению, уменьшения износа шин, снижения расхода топлива, обеспечения стабилизации управляемых колес оси шкворней (или оси поворота) и колеса устанавливают с определенными углами в пространстве.
Углы установки шкворней (осей поворота) и управляемых колес приведены на рис. 6.8. Управляемые колеса устанавливаются с развала αк (рис. 6.8, а), чтобы обеспечить вертикальное положение колес по отношению к дороге под нагрузкой при деформации деталей переднего моста. Угол развала на автомобилях различного типа и класса выбирается в пределах 0…20 и обеспечивается соответствующим наклоном поворотной цапфы. по отношению к балке моста. В эксплуатации за счет износа подшипников колес и втулок шкворней этот угол может изменятся. поэтому в конструкции передних управляемых мостов предусматривается регулировка развала колес.
Вследствие развала, управляемые колеса стремятся катиться в сторону от продольной оси автомобиля, что отрицательно сказывается на износе шин. Для компенсации этого явления передние колеса устанавливают со схождением. Угол схождения управляемых колес (δк) определяется разницей расстояний А и Б (рис. 6.8, б), замеряемых по краям ободов колес сзад (Б) и спереди (А). Углы схождения управляемых колес разных автомобилей находятся в пределах 0020'…10, а разность расстояний (Б – А) - в пределах 2…8мм. В эксплуатации из-за износа шарниров рулевых тяг и их деформации, из-за износа втулок шкворней или шарниров подвески эти углы могут изменяться, поэтому предусмотрена их регулировка за счет изменения длины поперечной рулевой тяги или рулевых наконечников.
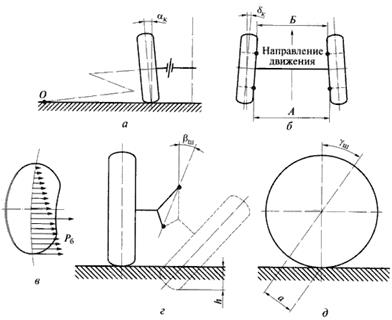
Рис. 6.8. Схема установки (а, б) и стабилизации (в, г, д) управляемых колес автомобиля
В совокупности углы развала и схождения управляемых колес обеспечивают минимальное их боковое скольжение и износ шин.
Для обеспечения стабилизации управляемых колес оси шкворней и осей поворота устанавливают с поперечным (βш) и продольным (γш) углами. За счет поперечного угла наклона βш обеспечивается создание весового стабилизирующего момента; за счет продольного угла наклона γш создается упругий и скоростной стабилизирующие моменты. У разных автомобилей поперечный угол наклона оси шкворня (оси поворота) составляет 50…100, продольный угол наклона – 0…3,50.
Комбинированный мост
Комбинированный мост выполняет одновременно функции ведущего и управляемого мостов. Комбинированный мост (рис. 6.9, а) включает в себя балку моста, главную передачу 1, дифференциал 2, привод на ведущие колеса 3, 4, 5 и ступицы колес 6.
При зависимой подвеске (рис. 6.9, а, б) комбинированный мост имеет неразрезную балку и привод ведущих колес виде шарнира равных угловых скоростей. Крутящий момент от дифференциала 2 к карданному шарниру 4 передается через внутреннюю полуось 3; далее от карданного шарнира равных угловых скоростей крутящий момент передается на внешнюю полуось 5 и ступицу колеса 6, установленную на полуосевом рукаве на подшипниках.
При независимой подвеске (рис. 6.9, в) используются карданные передачи с двумя шарнирами равных угловых скоростей. При этом внутренние шарниры обеспечивают вертикальное перемещение управляемых колес, а наружные шарниры – их поворот. Иногда (рис. 6.9, г) используют карданные передачи с двумя шарнирами неравных угловых скоростей 7 и одним шарниром равных угловых скоростей 4.

Рис. 6.9. Схемы комбинированных мостов (а) и приводов ведущих колес (б, в, г): 1 - главная передача; 2 – дифференциал, 3, 5 – внутренняя и внешняя полуоси; 4 – шарнир равных угловых скоростей; 6 – ступица; 7 – шарниры неравных угловых скоростей.
На рис. 6.10 приведена конструкция переднего моста автомобиля ВАЗ, имеющего привод на все колеса. Такой мост выполняет функции ведущего и управляемого мостов и имеет постоянный привод от раздаточной коробки. Картер моста 4 выполнен неразъемным из алюминиевого сплава. Внутри установлены главная передача 8 и дифференциал 7.

Рис. 6.10. Передний ведущий мост автомобиля повышенной проходимости ВАЗ: 1, 2, 9 – крышки; 3 – шпилька; 4 – картер; 5 – сапун; 6 - кронштейн; 7 – дифференциал; 8 – главная передача; 10. 11 – пробки; 12 - подшипник; 13 – шарнир
Картер моста крепится к кронштейну двигателя с помощью шпилек 3 и кронштейна 6. Привод передних колес осуществляется через карданную передачу.
Расчет мостов
Расчет балок мостов производится на прочность при режимах нагружения:
• прямолинейное движение с максимальной продольной силой и отсутствии действия поперечной силы;
• при полном заносе автомобиля с действием поперечной силы и отсутствии действия продольных сил;
• при переезде препятствия и динамическим нагружением вертикальной силой.
Схема расчета балки ведущего моста по первому и второму нагрузочным режимам приведена приведена на рис 6.11.
а) б)
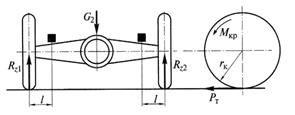
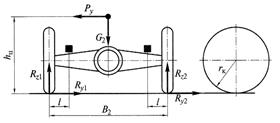
Рис. 6.11. Схемы нагружения балки ведущего моста: а – при прямолинейном движении и действии продольной силы PT; б – при боковом заносе и действии поперечной силы PY
При прямолинейном движении балка ведущего моста изгибается в вертикальной плоскости от действия сил Rz1 = Rz2 =  и в горизонтальной плоскости от действия тяговых сил РT1 = PT2 = Rz1 φx = Rz2φx,
и в горизонтальной плоскости от действия тяговых сил РT1 = PT2 = Rz1 φx = Rz2φx,
где m2 = 1,2 – коэффициент динамического перераспределения нагрузки;
G2 – статическая нагрузка на мост;
φx = 0,9 – коэффициент сцепления колес с дорогой в продольном направлении.
Момент изгибающий в вертикальной плоскости:
MВ = Rz1× l = Rz2×l; (6.1)
момент изгибающий в горизонтальной плоскости:
Mг = RТ1× l = RТ2×l, (6.2)
где l – расстояние от линии действия силы до опасного сечения;
момент крутящий от действия касательной силы PT:
Mкр = PT×rк, (6.3)
rк – радиус ведущего колеса.
В балке ведущего моста опасными сечениями являются сечения под площадками крепления рессор и места запрессовки полуосевых рукавов.
Результирующий момент изгиба и кручения в опасном сечении составит:
Mр =  . (6.4)
. (6.4)
Для трубчатого круглого сечения результирующее напряжение
σр =  , (6.5)
, (6.5)
где W = 0,2  - момент сопротивления трубчатого круглого сечения.
- момент сопротивления трубчатого круглого сечения.
Для прямоугольного и коробчатого сечений напряжения изгиба в вертикальной и горизонтальной плоскостях определяются раздельно и суммируются арифметически:
σи =  +
+  . (6.6)
. (6.6)
Поскольку напряжения изгиба относятся к переферийным волокнам, а напряжения кручения к средним волокнам, их определяют отдельно и с напряжением изгиба не суммируют:
τкр =  , (6.7)
, (6.7)
где Wкр – момент сопротивления кручению сечения балки.
При расчетном режиме движения автомобиля с полным боковым заносом сила PT = 0 балка изгибается только в вертикальной плоскости под действием сил Rz и Ry. которые определяются зависимостями:
Rz1 =  (1 +
(1 +  ) и Rz2 = (1 - ); (6.8)
) и Rz2 = (1 - ); (6.8)
Ry1 = Rz1φy = (1 + ) φy и Ry2 = Rz2φy = (1 - ) φy, (6.9)
где φy – коэффициент сцепления колес с дорогой в поперечном направлении;
hц – высота расположения центра массы;
В2 – колея колес.
Изгибающие моменты от действия сил на левом и правом колесах:
Mиз1 = (Rz1 - Ry1) ·l и Mиз2 = (Rz2 + Ry2) ·l. (6.10)
Напряжение изгиба в опасном сечении балки:
σиз =  . (6.11)
. (6.11)
Для расчетного режима переезда неровности балка моста изгибается от действия силы Rzkд. Напряжение изгиба в опасном сечении определится по формуле:
σиз =  =
=  , (6.12)
, (6.12)
где kд – коэффициент динамичности: для легковых автомобилей kд = 1,75, для грузовых автомобилей kд = 2,5…3,0.
Допускаемые напряжения для расчета балок ведущих мостов составляют значения:
[σиз] = 300МПа; [τкр] = 200МПа - для литых из стали и ковкого чугуна;
[σиз] = 500МПа; [τкр] = 400МПа - для штампосватных из листовой стали.
Балку управляемого моста (рис. 6.12)в режиме прямолинейного движения с торможением рассчитывают на прочность по напряжениям изгиба в вертикальной плоскости от действия сил Rz1 и Rz2 и в горизонтальной плоскости от действия силы Pтор. Кроме того на участке от поворотного кулака до опорной площадки под рессору балка испытывает напряжение кручения от действия тормозного момента на опорных щитах Мтор = Рторrк.
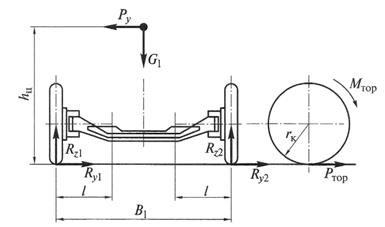
Рис. 6.12. асчетная схема балки управляемого моста
Изгибающий момент в вертикальной плоскости равен
Mиз = Rz×l;
изгибающий момент в горизонтальной плоскости
Mг = Ртор×l = Rz×φx×l;
момент кручения
Mкр = Ртор×rк = Rz×φx×rк,
где l – плече изгибающей силы (рис. 6.12);
φx = 0,9 – коэффициент сцепления колеса с дорогой в продольном направлении.
При расчете по режиму полного заноса нормальная реакция на левом колесе будет больше, чем на правом. Изгибающие моменты в сечениях балки слева справа определятся из зависимостей:
Mиз1 =  (1 +
(1 +  ); (6.13)
); (6.13)
Mиз =  (1 - ) (l + φxrк), (6.14)
(1 - ) (l + φxrк), (6.14)
где G1 – нагрузка на управляемый мост;
φy = 1,0 - коэффициент сцепления колеса с дорогой в поперечном направлении;
В1 – колея передних колес;
hц – высота центра массы автомобиля.
При расчете балки в режиме преодоления препятствия определяется изгибающий момент в вертикальной плоскости
Mв = kд l.
Поскольку сечение балки управляемого моста двутавровое, то напряжения изгиба определяют в вертикальной и в горизонтальной плоскости, а затем их арифметически складывают:
σ∑ =  +
+  ;
;
напряжение кручения определяется из соотношения:
τкр = ,
где Wв и Wг – моменты сопротивления изгибу двутаврового сечения балки в вертикальной и горизонтальной плоскостях соответственно;
Wкр – момент сопротивления изгибу сечения балки.
Балки управляемых мостов изготавливают кованными из сталей марок 45, 30Х, 40Х.
Допускаемые напряжения изгиба [σиз] = 300МПа, допускаемое напряжение кручения [τкр] = 150МПа.
Расчет поворотных кулаков (рис. 6.13) ведется на изгиб в режиме торможения в вертикальной и горизонтальной плоскостях с проверкой сечения на переходе от цапфы к проушине. Изгибающий момент равен:
Mиз = с  , (6.16)
, (6.16)
где с – плечо действия изгибающих сил.
Напряжение изгиба σиз = .
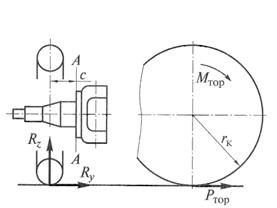
Рис. 6.13. Расчетная схема поворотного кулака
Напряжение изгиба цапфы поворотных кулаков в режиме заноса определим из соотношений:
σиз1 =  ; σиз2 =
; σиз2 =  . (6.17)
. (6.17)
Напряжение изгиба цапфы поворотных кулаков в режиме преодоления препятствия
σиз =  , (6.18)
, (6.18)
где с – плечо изгибающей силы.
Поворотные цапфы изготавливают из сталей марок 30Х, 40Х.
Допускаемые напряжения изгиба [σиз] = 300МПа.
Расчет поворотных шкворней (рис. 6.14) ведется по тем же трем нагрузочным режимам с допущением, что ось шкворня располагается вертикально. Нагрузке подвергаются
Рис. 6.14. Расчетная схема поворотного шкворня
верхний и нижний концы шкворня.
В режиме торможения значение этих сил определится соотношениями:
от действия нормальной реакции -
 =
=  =
=  ; (6.19)
; (6.19)
от действия тормозной силы –
 =
=  =
=  ; (6.20)
; (6.20)
от действия реактивной силы P1 –
 =
= 
 =
=  (6.21)
(6.21)
где Р1 =  ;
;
от действия тормозного момента Mтор = Рторrк –
 =
=  =
=  . (6.22)
. (6.22)
Суммарная сила, действующая на верхний конец шкворня, определится из радикала:
 =
=  . (6.23)
. (6.23)
Суммарная сила, действующая на нижний конец шкворня, определится из радикала:
 =
=  . (6.24)
. (6.24)
Из сравнения (6.23) и (6.24) следует, что нижний конец шкворня нагружен большей силой, чем верхний.
В режиме заноса автомобиля на верхний и нижний конец шкворня действуют силы:
от нормальной реакции Rz:
=  ; =
; =  ; (6.25)
; (6.25)
от действия поперечной силы Ry:
на левом шкворне
=  =
=  ; (6.26)
; (6.26)
на правом шкворне
= =  ; (6.27)
; (6.27)
суммарные силы:
на левом шкворне
 ;
;  ; (6.28)
; (6.28)
на правом шкворне
 ;
;  . (6.29)
. (6.29)
Здесь Rz1, Rz2, Ry1, Ry2 – нормальные и поперечные реакции на левом и правом колесе соответственно;  - силы в верхней и нижней части шкворня соответственно.
- силы в верхней и нижней части шкворня соответственно.
При переезде через неровность дороги на шкворень действуют силы:
 =
=  . (6.30)
. (6.30)
Шкворень на всех режимах рассчитывают на изгиб в опасном сечении, расположенном на границе с проушиной балки и срез, а втулки шкворня на смятие:
напряжение изгиба
σиз =  =
=  , (6.31)
, (6.31)
где h – высота проушины поворотного кулака;
d – диаметр сечения шкворня;
напряжение среза
τср = 4  ; (6.32)
; (6.32)
напряжение смятия
σсм =  . (6.33)
. (6.33)
Шкворни изготавливают из сталей марок 45, 50, 20Х, 20ХН, 18ХГТ. Допускаемые напряжения изгиба [σиз] = 500МПа, среза [τср] = 100Мпа, смятия [σсм] = 50МПа.