 2020-08-05
2020-08-05 1669
1669К подвеске автомобиля кроме общих требований, изложенных в разделе 1, предъявляются следующие специальные требования:
• обеспечение плавности хода;
• обеспечение движения автомобиля по неровностям дороги без ударов в ограничители сжатия и отбоя;
• ограничение поперечного крена кузова при движении автомобиля на поворотах;
• обеспечение гашения колебаний кузова и колес при движении автомобиля по неровностям дороги;
• обеспечение согласования кинематики перемещения управляемых колес с кинематикой поворота приводных валов, исключение автоколебаний управляемых колес;
• постоянство колеи и углов установки колес, углов наклона шкворней (осей поворота);
• надежная передача от колес к кузову продольных и поперечных сил;
• минимальная подрессоренная масса.
Для обеспечения плавности хода, не вызывающей повышенной утомляемости водителя и пассажиров, должна быть обеспечена соответствующая частота колебаний подрессоренной массы и вибронагруженность водителя и пассажиров. Так при нагрузке, близкой к статической Gст, характеристика подвески должна обеспечивать оптимальную частоту колебаний подрессоренной массы: 0,8…1,2Гц для легковых автомобилей и 1,2…1,9Гц для грузовых автомобилей. Нормы допустимых виброскоростей, устанавливаемых ГОСТ 12.1.012-78 для различных частот колебаний приведены в табл. 7.1.
Таблица 7.1. Средние частоты по октавным полосам и нормы вибронагруженности
| Ср. геометрические значения частотных полос, Гц | 1 | 2 | 4 | 8 | 16 | 31,5 | 63 | |
| Допустимые значения виброускорений, м/с2 | Вертикаль-ные | 1,1 | 0,79 | 0,57 | 0,6 | 1,14 | 2,26 | 4,49 |
| Горизонталь-ные | 0,39 | 0,42 | 0,8 | 1,62 | З,2 | 6,38 | 12,76 | |
| Допустимые значения виброскоростей, м/с (дБ) | Вертикаль-ные | 0,2 (132) | 0,071 (123) | 0,025 (114) | 0,013 (108) | 0,011 (107) | 0,011 (107) | 0,011 (107) |
| Горизонталь-ные | 0,063 (122) | 0,035 (117) | 0,032 (116) | 0,032 (116) | 0,032 (116) | 0,032 (116) | 0,032 (116) | |
Удовлетворение требований по плавности хода автомобиля обеспечивается определенной зависимостью вертикальной реакции на колесо Rz от прогиба упругого элемента подвески f, называемой упругой характеристикой подвески (рис. 7.4).
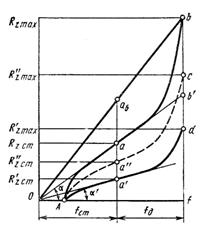
Рис. 7.4. Упругая характеристика подвески
Упругая характеристика подвески представляет собой зависимость вертикальной нагрузки Rz на колесо от деформации подвески f, измеренной непосредственно над осью колеса. Подвеска характеризуется статическим fст и динамическим fд прогибами, коэффициентом динамичности кд = Rzmax/Rzст. Упругая характеристика должна проходить через точку а, соответствующую полной статической нагрузке и статическому прогибу, характеризующему заданную плавность хода. Но кроме этого, для устранения опасности соприкосновения металлических деталей при максимальной деформации упругого элемента характеристика должна пройти через точку b, определяемую коэффициентом динамичности кд = 1,75…2,5. Выполнение такого условия возможно только при нелинейной характеристике упругого элемента подвески.
Динамический прогиб для легковых автомобилей составляет fд = 0,5 fст; для автобусов
fд = 0,75 fст; для грузовых автомобилей fд = fст.
В упругую характеристику подвески (А – а - b) включается буфер отбоя. Который уменьшает ход подвески на величину ОА.
Масса, приходящаяся на переднюю и заднюю подвески, меняется (у легковых для передних подвесок на 10…30% и для задних - на 45…60%; у грузовых на 240…400%; у автобусов на 200…250%), поэтому, желательно, чтобы характеристика при изменении нагрузки изменялась. Так на рис. 7.4 приведены желаемые формы кривых характеристик для порожнего (А – а' – d) и полунагруженного (A – a'' – c) автомобиля.
Для обеспечения высокой плавности хода подвеска должна эффективно гасить колебания подрессоренной и неподрессоренных масс автомобиля. При высокой плавности хода за один период свободных колебаний амплитуда перемещения подрессоренной массы должна уменьшаться в 3…8 раза.
Гашение колебаний автомобиля происходит в результате действия сил трения в амортизаторах (жидкостное трение), в рессорах и шарнирах (сухое трение), в шинах (межмолекулярное трение). Сухое и межмолекулярное трение при эксплуатации автомобиля изменяется, не поддается регулированию и снижает показатели плавности хода. Поэтому в легковых автомобилях сухое трение стараются довести до минимума.
Основным вкладом в гашение колебаний кузова и колес автомобиля вносит гидравлический амортизатор. Сопротивление колебаниям, создаваемое амортизатором, является характеристикой, поддающейся изменению в широком диапазоне по сравнению с другими параметрами колебаний автомобиля.
Характеристика амортизатора представляет собой зависимость силы сопротивления Pa от скорости деформации подвески (перемещения поршня амортизатора) Vп, т.е.
Pa = к  , (7.1)
, (7.1)
где к – коэффициент сопротивления амортизатор;
n – показатель степени.
Из приведенных на рис. 7.5 характеристик амортизатора видно, что коэффициент сопротивления при отбое больше, чем при сжатии. Обычно их отношение составляет kсж/ kот = 0,2…0,5. Отсюда следует, что при отбое гасится основная часть энергии колебаний.
Такое соотношение сопротивления амортизатора при сжатии и отбое диктуется необходимостью уменьшения передаваемых на водителя и пассажиров усилий при движении автомобиля по неровностям дороги.
Приведенный коэффициент сопротивления амортизатора определяется как среднее арифметическое:
k =  (7.2)
(7.2)


а б
Рис. 7.5. Линейная (а) и прогрессивная (б) характеристики амортизатора
Сила сопротивления амортизатора пропорциональна скорости перемещения
поршня в некоторой степени «n». Значение «n» зависит от конструкции клапанов и может быть меньше, больше или равным единице. На автомобилях применяются амортизаторы с линейной (n=1) и с квадратичной (n=2) характеристиками: на рис. 7.5, а приведена линейная несимметричная характеристика амортизатора при значении n=1; на рис. 7.6, б приведена прогрессивная (значение n>1) характеристика амортизатора.
Коэффициент сопротивления амортизатора не в полной мере характеризует свойство подвески гасить колебания подрессоренной массы. Один и тот же амортизатор в подвесках автомобилей с отличающимися массами дает различный эффект. Поэтому иногда рекомендуют коэффициент, приведенный на единицу массы автомобиля М:
kпр =  . (7.3)
. (7.3)
Однако наилучшим образом эффективность гашения колебаний подрессоренной и неподрессоренной масс автомобиля оценивает относительный коэффициент затухания:
Ψп=  =
=  . (7.4)
. (7.4)
При значениях относительного коэффициент затухания Ψп = 0,15…0,30 подвеска обеспечивает вполне приемлемое гашение колебаний кузова и колес и, как следствие, хорошую плавность хода.
Согласование кинематики управляемых колес с работой привода передних ведущих колес проводится путем соответствующего размещения шаровых опор стоек передней подвески и шарниров привода. Конструктивное решение такой компоновки приведено на примере рычажно-телескопической подвески переднеприводного автомобиля ВАЗ (рис. 7.6). Расположение поворотного кулака 2 согласуется с расположением оси поворота управляемого колеса, проходящей через центр подшипника 12 верхней опоры 13 и центр шаровой опоры 4.
При движении автомобиля по неровностям дороги происходит изменение положения колес по отношению к кузову. Подвеска должна обеспечивать правильную кинематику управляемых колес при их вертикальных перемещениях, т.е. перемещение колес не должно вызывать излишнее изменение колеи и сохранять требуемые углы установки.
Кинематика управляемых колес считается вполне соответствующей предъявляемым к ней требованиям, если угол наклона при максимальном перемещении не превышает 5…60, а изменение колеи находится в пределах упругого смещения шины. Известно, что эластичные шины допускают изменение колеи на 4…5мм на каждом колесе без перехода в поперечное скольжение. Выполнение требований к кинематике управляемых колес способствует сохранению управляемости и устойчивости автомобиля.
Степень изменения положения управляемых колес при их вертикальном перемещении зависит от типа направляющего устройства подвески. Каждая из приведенных на рис. 7.3 схем направляющих устройств по разному влияет на изменение колеи и улов установки управляемых колес.
Зависимая подвеска (рис. 7.3, а) не обеспечивает правильную кинематику управляемых колес, т.к. при наезде одного колеса на препятствие изменяется положение и другого колеса, что может вызвать боковое скольжение. Перекос управляемого моста автомобиля сопровождается изменением расположения осей их вращения и возникновением гироскопических моментов, действующих в горизонтальной Mгx и вертикальной Mгz плоскостях. Перекос моста вызывает автоколебания управляемых колес вокруг оси шкворня.
Колебания управляемых колес вокруг осей шкворней совершаются с высокой (более 10 Гц и амплитудой не более 1.5…2мм) и низкой (менее 1 Гц и амплитудой 2…3мм). Колебания высокой частоты происходят в пределах упругости шин и не передаются на рулевое колесо и не влияют на управляемость. Вместе с тем, они вызывают дополнительное изнашивание шин и увеличивают расход топлива. Колебания низкой частоты влияют на управляемость и безопасность движения. Исключить или уменьшить их можно, снизив скорость движения. За счет углов установки шкворней можно увеличить значение скоростей, при которых появляется эффект автоколебаний управляемых колес, выводя их из диапазона эксплуатационных скоростей. Эффективным средством уменьшения автоколебаний управляемых колес является применение независимых подвесок.
Однорычажные независимые подвески (рис. 7.3, б) вертикальные перемещения колеса сопровождаются изменением коле на величину ∆В и развала на угол α, что вызывает возникновение гироскопического эффекта и возбуждает автоколебание управляемых колес.
Для исключения или снижения вероятности появления автоколебания управляемых колес применяют двухрычажные направляющие устройства (рис.7.3, в, г). В случае применения рычагов одинаковой длины (рис. 7.3, в) колесо перемещается строго вертикально, что исключает возможность возникновения гироскопических моментов в горизонтальной Mгx и вертикальной Mгz плоскостях. Однако имеет место существенное изменение колеи.
В подвесках с рычагами разной длины изменение угла наклона колес α вызывает возникновение гироскопических моментов меньшей, чем при однорычажной подвеске, а изменение колеи находится в пределах компенсации свойствами упругости шины.
Наилучшую кинематику управляемых колес обеспечивает рычажно-телескопическая подвеска (рис. 7.3, д; рис. 7.6). Такая подвеска устраняет склонность колес к автоколебаниям, т.к. возникающие гироскопические моменты незначительны, обеспечивает хорошую устойчивость автомобиля за счет отрицательного плеча обката, характерного тем, что ось поворота пересекается с опорной поверхностью с внешней стороны площадки контакта.
Независимая подвеска с продольными рычагами направляющего устройства (рис. 7.3, е) при перемещениях управляемых колес по вертикальной оси обеспечивает постоянство колеи, но боковая жесткость ее не высокая. Такие подвески применяются на задних колесах.
Масса подвески существенно влияет на плавность хода автомобиля, поскольку от ее величины зависит масса неподрессоренных частей. В процессе движения по неровностям дороги неподрессоренная масса колеблется с частотой 6…10с-1. Масса передней и задней подвесок от сухой массы грузовых автомобилей составляет соответственно 1,5…3,5% и 5.5…8,0%; масса задней подвески легкового автомобиля может составлять 2,5…3,5%.
Снижение массы подвески уменьшает динамические нагрузки на детали, повышает плавность хода, надежность и срок службы подвески и достигается в основном за счет рациональных конструкции и размеров направляющих устройств. Однорычажные подвески имеют меньше массу по сравнению с двух рычажными. Но минимальную массу имеют рычажно-телескопические подвески, поскольку телескопическая стойка выполняет одновременно функции направляющего и гасящего элементов.
Упругий элемент в общей массе подвески занимает заметное место. Наибольшую массу имеют рессоры, которые применяются в зависимых подвесках, наименьшую - торсионы. При определении неподрессоренной массы к ней относят около 75% рессоры и 33% пружины, торсион в полном объеме относят к подрессоренной массе.








