 2020-08-05
2020-08-05 518
518Лекция №9.
Создание моделей поверхностей
Вопросы для изучения:
1. Понятие об интерполяции. Виды интерполяции.
2. Применение интерполяции.
3. Проблемы интерполяции.
Понятие об интерполяция
Поскольку для непрерывных поверхностей, — топографических, экономических, демографических или климатических мы используем выборку, — нам нужна возможность изображать с приемлемой точностью наблюдаемые явления. В традиционной картографии, например, точечные значения выборки высот или значений для других статистических поверхностей преобразуются в визуальную форму, использующую изолинии. Но нам нужна возможность создания и других форм визуального представления, таких как блок-диаграммы и карты отмывки рельефа. И, конечно, нам нужна возможность определения уклонов, экспозиций склонов и поперечных сечений и предсказания неизвестных значений высот для объектов, на которые у нас нет соответствующих данных. Интерполяция обеспечивает многое из того, что нужно для выполнения этих операций.
Итак, интерполя́ция (интерполи́рование) - это способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений.
Виды интерполяции:
1) линейная интерполяция.
Внутри этих простых последовательностей мы можем легко идентифицировать упомянутое выше априорное утверждение, а именно то, что каждое последующее число определяется простым математическим действием. Если мы можем распознать это действие, то сможем восстанавливать пропущенные значения.
До сих пор мы имели дело с линейной интерполяцией, предполагая, что поверхность изменяется линейным образом. Однако, последовательность отсчетов высоты не всегда следует линейному закону. В некоторых случаях она скорее логарифмическая, в других может предсказываться только для небольших участков поверхности. В таких случаях линейная интерполяция не даст адекватных результатов. Кроме того, существуют и другие подходы к поверхностной информации, которые могут потребовать определения общего закона изменения поверхности, а не детального ее описания. Некоторые из этих методов могут быть весьма сложными математически, так что мы ограничимся концептуальным уровнем рассмотрения некоторых методов нелинейной интерполяции, чтобы понять, как их можно использовать в ГИС наилучшим образом.
Другие методы интерполяции
Здесь мы рассмотрим три метода интерполяции:
Метод обратных взвешенных расстояний (ОВР)
Метод оценки поверхности тренда
Кригинг
1. Метод обратных взвешенных расстояний исходит из предположения, что чем ближе друг к другу находятся точки данных, тем ближе их значения. (Рис.1) Например, двигаясь по склону холма, вы можете отметить большее сходство в значениях высоты в близлежащих к вашему текущему положению точках по сравнению с точками, которые удалены гораздо дальше. То же можно было бы сказать, если бы вы двигались по равнине. Для более точного описания топографии нам нужно выбрать точки окрестности, которые демонстрируют это сходство поверхности. Это достигается несколькими приемами поиска, включая определение окрестности на заданном удалении от каждой точки, предварительным заданием числа точек выборки данных или выбором определенного числа точек в квадрантах.
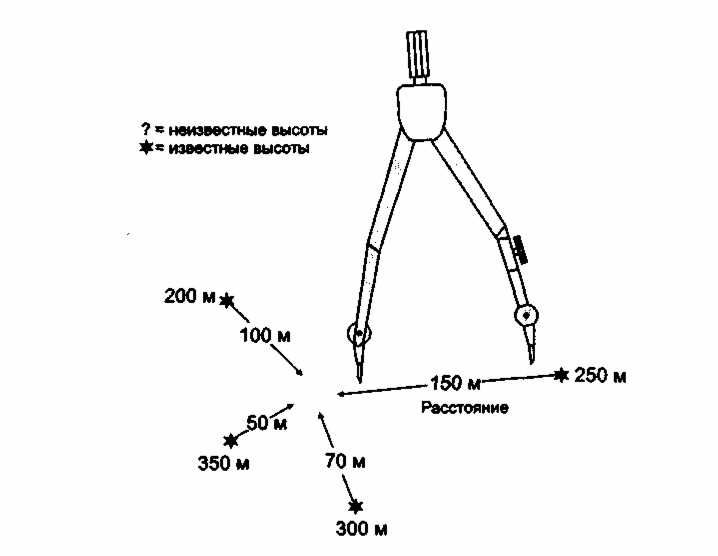
Рисунок 1. Интерполяция со взвешиванием по расстоянию. Заметьте, что близкие точки оказывают большее влияние, чем удаленные. Например, недостающая величина будет ближе к отметке высоты 350 вследствие ее большей близости к интерполируемой точке.
Какой бы метод ни использовался, компьютер должен измерять расстояние между каждой парой точек и от каждой начальной точки. Затем значение высоты в каждой точке взвешивается в зависимости от квадрата расстояния, так что более близкие точки вносят больший вклад в определение интерполируемой высоты по сравнению с более удаленными. Существуют многие модификации этого подхода. Одни методы сокращают объем вычислений применением "поиска с обучением", другие используют в качестве весового коэффициента вместо второй степени третью или более высокую, третьи учитывают барьеры, представляющие береговую линию, скалы или иные непреодолимые объекты, которые могут воздействовать на результаты интерполяции. Как и при использовании барьеров в других задачах моделирования, процесс интерполяции не может распространяться через барьер.
Метод оценки поверхности тренда
В некоторых случаях нас больше интересует общие тенденции поверхности, нежели точное моделирование мелких неровностей. Например, нас может интересовать общее распределение населения по стране для демографического исследования, или подход к каменноугольному пласту с поверхности, чтобы определить, сколько необходимо удалить поверхностного грунта. Наиболее распространенный подход к такой характеристике поверхности называется поверхностью тренда.
Как и в методе ОВР, для поверхностей тренда мы используем наборы точек в пределах заданной окрестности, которая строится на основе любого из способов, перечисленным для методов со взвешиванием. В пределах каждой окрестности строится поверхность наилучшего приближения на основе математических уравнений, таких как полиномы или сплайны (polynomials, splines). Эти уравнения являются нелинейными зависимостями, которые аппроксимируют кривые или другие формы числовых последовательностей. Чтобы построить поверхность тренда, каждое из значений в окрестности подставляется в уравнение. Из уравнения, использованного для построения поверхности наилучшего приближения, получается одно значение и присваивается интерполируемой точке. Процесс продолжается для других целевых точек; кроме того, поверхность тренда может быть расширена на все покрытие.
Число, присваиваемое целевой ячейке, может быть простым средним всех значений поверхности в окрестности, или оно может быть взвешенным с учетом определенного направления, в котором ориентирован тренд. Поверхности тренда, могут быть плоскими, показывая общую тенденцию для всего покрытия, или они могут быть более сложными. Тип используемого уравнения (или степень полинома) определяет величину волнистости поверхности. Чем проще выглядит поверхность тренда, тем меньший порядок, как говорят, она имеет. Например, поверхность тренда первого порядка будет выглядеть как плоскость, простирающаяся под некоторым углом по всему покрытию, т. е. она имеет тенденцию в одном направлении. Если поверхность имеет один изгиб, то такую поверхность называют поверхностью тренда второго порядка (Рисунок 4) и т. д.
Метод кригинг
Последний рассматриваемый метод интерполяции, кригинг ( kriging), оптимизирует процедуру интерполяции на основе статистической природы поверхности. (Рис.2) Кригинг использует идею регионализированной переменной (regionalized variable), которая изменяется от места к месту с некоторой видимой непрерывностью, но не может моделироваться только одним математическим уравнением. Оказывается, многие топографические поверхности подходят под это описание, также как и поверхности изменения качества руды, вариации качества почв и даже некоторые показатели растительности.

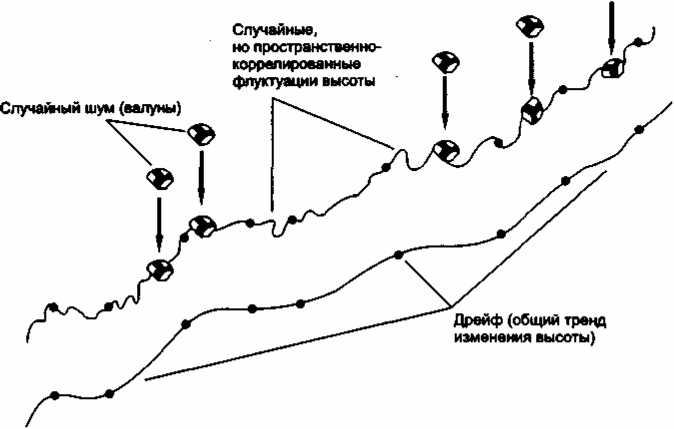
Рисунок 2. Элементы кригинга: а) дрейф (общая тенденция), б) случайные, но пространственно коррелированные высотные колебания (небольшие отклонения от общей тенденции), и в) случайный шум (камни), иллюстрируемые восхождением по склону горы.
Кригинг обрабатывает эти поверхности так, считая их образованными из трех независимых величин. Первая, называемая дрейфом или структурой (drift or structure) поверхности, представляет поверхность как общий тренд в определенном направлении. Далее, кригинг предполагает, что имеются небольшие отклонения от этой общей тенденции, вроде маленьких пиков и впадин, которые являются случайными, но все же связанными друг с другом пространственно (мы говорим, что они пространственно коррелированны). Наконец, мы имеем случайный шум (random noise), который не связан с общей тенденцией и не имеет пространственной автокорреляции.
С каждой из трех переменных надо оперировать в отдельности. Дрейф оценивается с использованием математического уравнения, которое наиболее близко представляет общее изменение поверхности, во многом подобно поверхности тренда. Ожидаемое значение высоты измеряется с использованием вариограммы (variogram, semivariogram) (Рисунок 3), на которой по горизонтальной оси откладывается расстояние между отсчетами, называемое лагом (lag), вертикальная ось несет так называемую полудисперсию (semivariance), которая определяется как половина дисперсии (квадрата стандартного отклонения) между каждым значением высоты и его соседями.

Рисунок 3. Пример вариограммы. Она показывает связь между точками данных и аппроксимирующей линией. Обратите внимание, что в некотором диапазоне значений лага высоты связаны друг с другом (дисперсия высот связана с лагом), а вне его нет вообще никакой связи (дисперсия достигает максимального значения), так как точки находятся слишком далеко друг от друга.
Таким образом, полудисперсия является мерой взаимосвязи значений высоты, зависящей от того, как близко друг к другу они находятся. Затем через точки данных проводится кривая наилучшего приближения, давая нам меру пространственнокоррелированной случайной компоненты. Посмотрев внимательно на график полудисперсии, вы можете заметить, что когда расстояние между точками отсчета высоты мало, полудисперсия тоже мала. Это значит, что значения высоты близки и, следовательно, взаимосвязаны вследствие их пространственной близости.
С ростом расстояния между точками растет и полудисперсия, показывая быстрый спад пространственной корреляции значений. Наконец достигается критическое значение лага, известное как предельный радиус корреляции (range), при котором дисперсия достигает предела и в дальнейшем остается постоянной. Чем ближе друг к другу находятся отсчеты внутри диапазона роста (т.е. от нуля до точки прекращения роста кривой на графике), тем более похожими они должны быть. За пределами радиуса корреляции расстояние между точками не имеет значения, они совершенно независимы на любом удалении, превышающем радиус. Это говорит нам о том, какая окрестность должна быть использована (например, в ОВР-интерполяции), чтобы охватить все точки, значения, высоты которых будут взаимосвязаны.
Третьим по важности моментом графика является то, что аппроксимирующая кривая не проходит через начало координат. По идее, если между отсчетами нет расстояния, то не должно быть и дисперсии, так как отсчеты являются по сути одной точкой. Но нужно помнить, что кривая является оценочной. Разница между нулевой дисперсией при нулевом лаге и предсказываемым положительным значением является остаточной, пространственно некоррелированной "шумовой" дисперсией, которая называется остаточной дисперсией (nugget variance). Эта остаточная дисперсия объединяет дисперсию ошибок измерения с пространственной дисперсией, которая имеет место на расстояниях, гораздо меньших, чем интервал взятия отсчетов, и которые в дальнейшем не могут быть устранены.
Теперь, имея три составляющие переменной, определенные вариограммой, мы можем определить веса, необходимые для выполнения интерполяции в локальных окрестностях. Однако, в отличие от ОВР, веса для интерполяции в пределах окрестностей выбираются с целью минимизации дисперсии оценки для всех комбинаций отсчетов высоты. Эта дисперсия может быть получена непосредственно из модели, по которой была прежде создана вариограмма.
Кригинг существует в двух основных формах:
1. Общий (universal) кригинг, чаще всего применяется, когда поверхность оценивается по нерегулярно распределенным отсчетам при наличии тренда (условие, называемое нестационарностью).
2.Ординарный (ordinary) кригинг является элементарной формой и предполагает, что данные стационарны (не имеют тренда), изотропны и собраны через равные интервалы. Наиболее часто ординарный кригинг используется для поиска точечных оценок на основе других точечных данных.
Ординарный кригинг по своей сути является лишь улучшением метода ОВР, в котором учитываются не только расстояния от интерполируемой точки до исходных, но и расстояния между самими исходными точками так, что веса более близких друг к другу исходных точек уменьшаются. Этот метод превосходит простой метод ОВР именно тогда, когда точки расположены с неравными интервалами, благодаря учету пространственной корреляции исходных данных. Разработан также вариант метода, уменьшающий объем вычислений в случае интерполяции многих точек при размещении исходных точек в узлах регулярной сетки, он называется блочным кригингом (block kriging). Метод позволяет также учитывать анизотропность, — в этом случае вариограмма аппроксимируется функцией двух независимых аргументов.
Кригинг часто дает довольно точные оценки пропущенных значений, но эта точность обходится ценой времени и вычислительных ресурсов. Но даже при этом кригинг имеет еще одно преимущество перед другими методами интерполяции, — он не только дает интерполированные значения, но также и оценку возможной ошибки этих значений. Это может навести на мысль, что данный метод следует применять повсеместно, но увы. Когда мы имеем дело с большим уровнем локального шума из-за ошибок измерений или большие вариации высоты между отсчетами, в данном методе становится трудным построение кривой полудисперсии. А в таких условиях результаты кригинга будут не лучше, чем полученные другими методами.
В векторных моделях данных (чаще всего TIN) процесс интерполяции проще всего выполняется выборкой точек с их значениями высоты и преобразованием их в точечную матрицу высот.
В растровых покрытиях значения высоты обычно соотносятся с точками, расположенными внутри каждой ячейки (например, в центре). Для интерполяции мы можем использовать именно эти точки и действовать по одному из описанных выше методов. В этом случае интерполируемым ячейкам растра присваиваются значения высоты, полученные для представляющих их точек. Если ваша ГИС не содержит нужного алгоритма, то, как правило, вы можете преобразовать точечные покрытия в форму, понимаемую специализированным программным обеспечением, рассчитанным на работу с пространственными данными. Затем его выходные данные могут быть преобразованы обратно для дальнейшего анализа внутри ГИС.








