2020-08-05
2020-08-05 312
312Производственные участки в зависимости от сложности выпускаемой продукции, программы производства и режима работы могут быть организованы по технологическому, предметному и линейному принципам.
Технологические участки характерны для значительной номенклатуры изготовляемых изделий и небольших объёмов выпуска, т.е. когда изделия производят единично или малыми сериями и исключается возможность полной загрузки оборудования изготовлением одного изделия. В таких случаях с целью повышения коэффициента загрузки оборудование делят на группы по признаку одинакового служебного назначения, например, на группы токарных, фрезерных, зуборезных и т.д. станков. Группы однотипного оборудования образуют технологические участки и занимают часть площади цеха. Изготавливаемые детали проходят технологические участки в строго определенной последовательности. Полуфабрикаты мелких и средних деталей при занятости оборудования следующего участка обработки поступают для хранения на межоперационный склад. Крупногабаритные изделия в таких ситуациях хранятся около станков или на специальных подкрановых площадках.
Недостатками такой формы организации производства являются многократные и значительные по длине пути перемещения полуфабрикатов, требующие широкого применения транспортных средств, сложного планирования и документации для учёта движения изделий и относительно невысокие технико-экономические показатели производства.
С уменьшением номенклатуры изделий и увеличением годового объёма их выпуска становится целесообразным использовать общность технологических маршрутов обработки и формировать производственные подразделения, используя предметный принцип: создание предметно-специализированных цехов (цех двигателей, коробок передач и т.п.) и участков. Формирование предметных участков производится по принципу общности конструктивных форм и технологических операций обработки деталей. Создание предметных участков в механических цехах осуществляется в следующей последовательности:
1. Конструктивно-технологическая классификация деталей по следующим признакам: вид материала заготовки, габариты, технологический процесс обработки, конструкция детали.
2. Расчёт по каждому наименованию детали показателя относительной трудоёмкости K Д, определяющего обезличенное число рабочих мест, необходимых для изготовления годовой программы i -й детали:
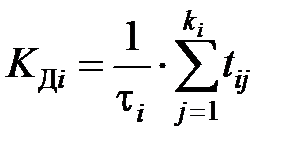 ,
,
где tij – норма времени на обработку i -й детали по всем ki операциям технологического процесса, мин.;
τ i = F Д/ Ni – такт выпуска i -й детали, мин./изд.;
FД - действительный годовой фонд времени рабочего места, мин.;
Ni – годовой объём выпуска i -й детали, шт.
3.Определение числа предметных участков
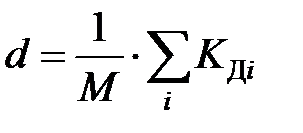 ,
,
где М – среднее число рабочих мест на участке, (30 ÷ 50).
4. Закрепление за каждым участком по возможности однородных деталей в соответствии с произведённой в п. 1 классификацией. При этом суммарный показатель относительной трудоёмкости деталей, закрепляемых за участком, должен быть близким к числу рабочих мест на участке.
При предметной форме организации обработки оборудование на участке размешают по ходу операций технологического процесса изготовления деталей данной группы, что уменьшает протяжённость путей транспортных операций, затраты времени и средств на их выполнение. Примерами предметных участков являются участки обработки валов, зубчатых колёс, корпусных деталей и т.п. Подобная форма используется как в серийном, так и в массовом производствах (специализированные цеха).
Линейный принцип формирования участков и цехов характеризуется строго определённой последовательностью операций технологического процесса в каждый момент времени и предусматривает поточные формы механической обработки. Поточные формы характерны преимущественно для массового и крупносерийного производства, но могут быть использованы и в серийном. Их внедрение предполагает достаточно устойчивую по времени программу выпуска, тщательную проработку конструкции изделия и технологии, чёткую организацию обслуживания, снабжения материалами и комплектующими.
Поточные линии механической обработки, в зависимости от количества наименований деталей, закреплённых за линией, могут быть однопредметными (поточно-массовыми) и многопредметными (поточно-серийными).
Оба этих вида, в свою очередь, по степени непрерывности движения деталей в процессе обработки подразделяются на непрерывно-поточные (синхронизированные) и прерывно-поточные (несинхронизированвые). Поточно-серийные кроме того, могут быть групповыми.
Тип линии можно выбрать, используя коэффициент массовости, показывающий число станков, необходимых для выполнения определенной операции:
K M i = K Д i / ki,
где ki – число операций технологического процесса обработки i -й детали. При K M i >0.8 по всем операциям технологического процесса целесообразна организация однопредметной непрерывно-поточной линии; при K M i = 0.7 ÷ 0.8 по основным операциям – однопредметной прерывнопоточной линии; при 0.2 ≤ K M i < 0.7 целесообразно создание серийно-поточных линий с закреплением от 2 до 15 наименований деталей, причём при равенстве показателей массовости по всем операциям технологического процесса возможна организация непрерывно-поточных линий, а при неравенстве – прерывных. Если K M i ≤ 0.2 и большая номенклатура (до 50 наименований) деталей, возможно создание групповых поточных линий (с переналадкой оборудования или без неё), приближающихся по своим технико-экономическим характеристикам к предметным участкам.
Высшей формой поточного производства является автоматическая линия, позволяющая сочетать непрерывность технологического процесса с автоматическим его выполнением. Автоматическая поточная линия представляет совокупность, станков-автоматов, выполняющих определённую последовательность операций механической обработки детали, объединенных общими для всей линии механизмами управления и автоматическим транспортным устройством, перемещающим обрабатываемую деталь от одного станка к другому.
Автоматические поточные линии, обладая высокой производительностью, в то же время не имеют необходимой гибкости, т.е. позволяют обрабатывать на линии только одну деталь определённой конструкции или, в лучшем случае, несколько однотипных деталей после переналадки оснастки линии.
Учитывая высокую стоимость оборудования автоматической линии и невозможность его использования при изменении конструкции выпускаемых изделий, их, как правило, применяют в массовом производстве при устоявшейся и годами не сменяемой продукции.
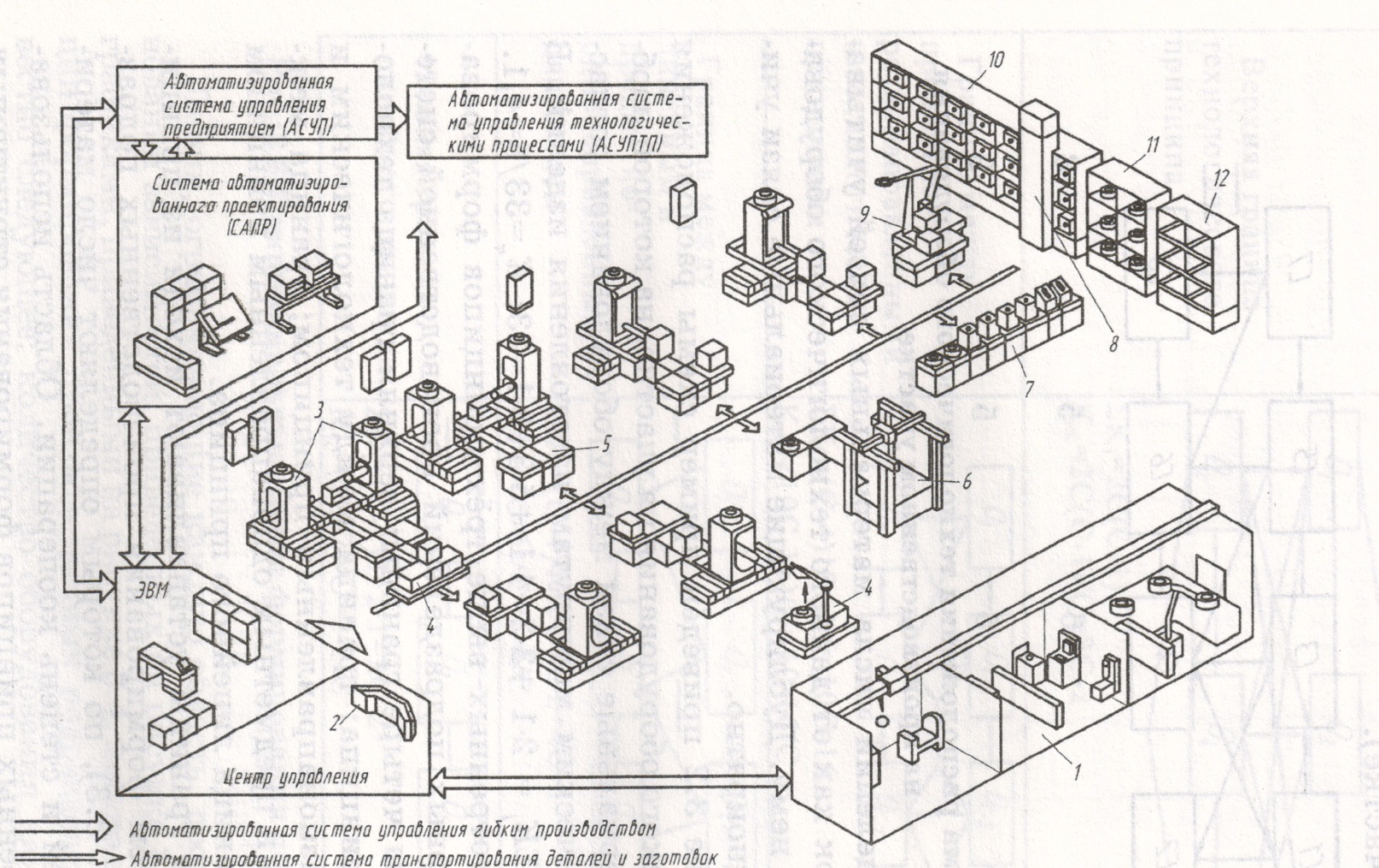
Современной тенденцией в развитии машиностроения является увеличение удельного веса многономенклатурного серийного производства и создание новой организационной формы механической обработки – гибкой производственной системы (ГПС). ГПС – это совокупность технологического оборудования и системы обеспечения его функционирования в автоматическом режиме, обладающая свойством автоматизированной переналадки при производстве изделий произвольной номенклатуры. В зависимости от уровня организационной структуры ГПС подразделяются на гибкие производственные модули (ГПМ), гибкие автоматизированные линии (ГАЛ), гибкие автоматизированные участки (ГАУ), гибкие автоматизированные цеха (ГАЦ) и гибкие автоматизированные заводы (ГАЗ).
ГПМ состоит из единицы программно-управляемого технологического оборудования, загрузочно-разгрузочных устройств в виде промышленных роботов (ПР) и станочных накопителей. ГПМ может функционировать автономно и встраиваться в систему более высокого ранга. ГАЛ и ГАУ объединяют несколько ГПМ с единой автоматизированной системой управления.
В ГПС на основе разработанной технологии осуществляются функционирование и обработка материального и информационного потоков. К первому относят заготовки, инструмент и оснастку, ко второму – программное обеспечение. В соответствии с этим ГПС включает в себя два основных комплекса: производственный и управляюще-вычислительный.
Производственный комплекс обеспечивает обработку деталей и объединяет следующие системы: станочную (СС), автоматизированную транспортно-складскую систему (АТСС), автоматизированную систему инструментообеспечения (АСИО), автоматизированную систему диагностики и контроля (АС-КИД). автоматизированную систему удаления отходов (АСУО), систему автоматизированного управления технологическими процессами (АСУТП), систему автоматизированного проектирования (САПР).
Управляюще-вычислительный комплекс обеспечивает функционирование всех систем ГПС и базируется на ЭВМ различного уровня. Пример ГПС приведён на рисунке 3.1. Выбор организационной формы механической обработки можно обосновать степенью кооперации K к, определяемой исходя из среднего числа материальных связей между технологическим оборудованием участка:
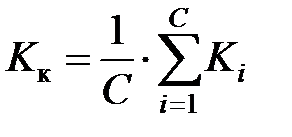
где: Ki – число материальных связей, которыми i -e оборудование связано с остальным оборудованием;
С – количество оборудования в структурном подразделении (на участке).