 2020-08-05
2020-08-05 177
177
После того как на АЦП поступает команда запуска, требуется некоторое конечное время, называемое временем преобразования  tc, прежде чем он сможет выдать правильные выходные данные. Изменение входного напряжения во время процесса преобразования вносит нежелательную неопределенность в генерируемый выходной сигнал [б]. Полная точность преобразования реализуется только в том случае, когда эта неопределенность не превосходит разрешения преобразователя. Таким образом, для n -разрядного преобразователя, характеризуемого временем преобразования, необходимо выполнение условия
tc, прежде чем он сможет выдать правильные выходные данные. Изменение входного напряжения во время процесса преобразования вносит нежелательную неопределенность в генерируемый выходной сигнал [б]. Полная точность преобразования реализуется только в том случае, когда эта неопределенность не превосходит разрешения преобразователя. Таким образом, для n -разрядного преобразователя, характеризуемого временем преобразования, необходимо выполнение условия



 .
.
Рассмотрим, например, синусоидальный входной сигнал с амплитудой А и частотой f:
Vi = A sin (2  ft),
ft),
преобразование которого осуществляется с помощью 8-разрядного преобразователя, и пусть время преобразования tc = 100 мкс. Скорость изменения входного сигнала
 = 2
= 2  fA cos(2 ft),
fA cos(2 ft),
а максимальное значение этой величины составляет
() = 2 fA.
Полагая ПД = 2А (полный размах синусоидального сигнала), получаем
2 fA  ,
,
f  ,
,
f = = 12Гц.
Таким образом, даже в случае относительно гладкого синусоидального сигнала мы ограничены низкой частотой 12,4 Гц. При столь жестком ограничении диапазон применений АЦП был бы исключительно узок. Эта трудность обходится путем использования на входе АЦП схемы или устройства выборки – хранения (УВХ). УВХ – простая аналоговая схема, которая по команде осуществляет отсчет значения входного сигнала и затем сохраняет это значение на приблизительно постоянном уровне, пока АЦП выполняет преобразование. Временным интервалом, определяющим по приведенной выше формуле допустимую скорость изменения входного напряжения, является теперь время задержки, называемое также апертурным временем ta. Здесь имеется в виду характерная для УВХ задержка между моментом получения команды и моментом фактического перехода схемы в режим хранения (схемы выборки – хранения очень подробно обсуждаются в разд. 5.4). Типичное значение апертурного времени – несколько десятков наносекунд. Если мы используем УВХ с апертурным временем, скажем 20 нc, то максимальная допустимая частота входного сигнала составит
f =  = 62,17кГц.
= 62,17кГц.
Это вполне приемлемое значение для преобразователя с tс = 100 мкс. Значение fmax может быть увеличено еще на два порядка, если командный цикл короче апертурной задержки. Величину fmax определяет при этом намного меньшая задержка, называемая апертурным дрожанием.
Производительность преобразователя – еще один важный параметр. Это – число отсчетов входного сигнала, выполняемых преобразователем в единицу времени при сохранении полной точности. Производительность преобразователя рассчитывается как обратная величина полного времени, необходимого для выполнения одного завершенного преобразования. Она является обратной величиной времени преобразования только в том случае, когда не используется УВХ. Пример расчета производительности с учетом влияния УВХ приведен в разд. 5.6.
5.3.3 Входные и выходные сигналы преобразователя
Аналоговый входной сигнал. Большинство монолитных преобразователей сконструированы в расчете на работу с дифференциальным или отсчитываемым от потенциала земли однополярным входным сигналом. Уровень этого сигнала должен быть согласован с установленным входным диапазоном преобразователя. Чаще всего используются входные диапазоны 0...10 В и 0...5 В. Если фактический диапазон изменения входного сигнала составляет только часть полного входного диапазона преобразователя, то некоторые выходные кодовые комбинации преобразователя никогда не будут реализованы. При этом неоправданно сужается динамический диапазон преобразователя, что приводит к более сильному влиянию погрешностей преобразователя на выходной сигнал. Наилучшее решение этой проблемы – выбор преобразователя с наиболее подходящим входным диапазоном и предварительное масштабирование входного сигнала с помощью операционного усилителя. В большинстве систем входной сигнал обычно требует некоторой предварительной обработки, и согласование может быть выполнено в конечном каскаде соответствующей обрабатывающей схемы. В некоторых случаях недостаточный размах входного сигнала можно скомпенсировать путем пропорционального уменьшения масштаба опорного сигнала при условии, что в конструкции преобразователя предусмотрена возможность регулировки уровня опорного сигнала.
Для биполярного входного сигнала тоже можно использовать однополярный преобразователь, сначала масштабируя этот сигнал, а затем добавляя к нему напряжение смещения, как показано на рис. 5.3. Если же на выходе необходимо иметь информацию о полярности сигнала, приходится использовать биполярный преобразователь. Биполярные преобразователи работают с биполярными входными диапазонами, чаще всего от – 5 до +5 В, и вырабатывают выходные сигналы в виде биполярных цифровых кодов (дополнительном, смещенном, прямом или обратном), которые обсуждались в разд. 4.1.
Аналоговый опорный сигнал. На рис. 5.4(а) показаны входы и выходы типичного АЦП. Для работы каждого АЦП нужен аналоговый опорный сигнал, с которым сравнивается входной сигнал.
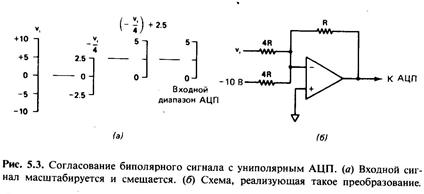
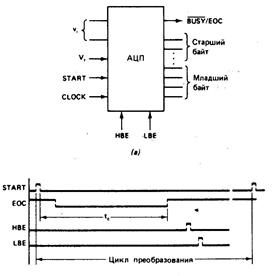
Рис. 5.4 Аналого-цифровой преобразователь (АЦП). (а) Типичные входы и выходы. (б) Типичные временные диаграммы управляющих сигналов
Любая погрешность опорного сигнала, связанная с неточностью его первоначальной установки или температурным и временным дрейфом, проявляется как погрешность усиления в передаточной характеристике АЦП. Поэтому точность и стабильность опорного сигнала являются важнейшими факторами в реализации полной точности АЦП. Дешевые интегральные стабилизаторы представляют собой подходящие источники опорного сигнала при условии, что окружающая температура изменяется в небольших пределах. Однако для большинства применений требуется лучшая температурная стабильность, которая может быть обеспечена прецизионными интегральными источниками опорного напряжения.
Существующие источники опорного напряжения на ИС можно разделить на два типа. В источниках первого типа используется обратный пробой компенсированного зенеровского диода (стабилитрона). Типичное напряжение таких источников равно примерно 6,9В, а температурный коэффициент напряжения изменяется в диапазоне (5...100)∙10  /˚С. В новейших устройствах этого типа используются «подповерхностные» или «скрытые» зенеровские диоды, в которых лавинный пробой происходит под поверхностным слоем кремния. Такая конструкция обеспечивает улучшение долговременной стабильности и шумовых характеристик. Интегральные источники опорного напряжения второго типа – это стабисторные источники, использующие прямое падение напряжения на диоде, которое определяется шириной запрещенной зоны. Вырабатываемое ими опорное напряжение соответствует экстраполированному значению ширины запрещенной зоны кремния (выраженному в вольтах). Температурная компенсация в этих источниках основана на использовании напряжений база – эмиттер двух транзисторов с различными токами смещения. Типичное значение напряжения таких источников равно 1,2 В.
/˚С. В новейших устройствах этого типа используются «подповерхностные» или «скрытые» зенеровские диоды, в которых лавинный пробой происходит под поверхностным слоем кремния. Такая конструкция обеспечивает улучшение долговременной стабильности и шумовых характеристик. Интегральные источники опорного напряжения второго типа – это стабисторные источники, использующие прямое падение напряжения на диоде, которое определяется шириной запрещенной зоны. Вырабатываемое ими опорное напряжение соответствует экстраполированному значению ширины запрещенной зоны кремния (выраженному в вольтах). Температурная компенсация в этих источниках основана на использовании напряжений база – эмиттер двух транзисторов с различными токами смещения. Типичное значение напряжения таких источников равно 1,2 В.
Источники опорного напряжения обоих типов следует использовать с буферными схемами (иногда располагаемыми на самом кристалле) для масштабирования напряжения к требуемому уровню и улучшения стабильности рабочей точки. Такие буферизованные источники опорного напряжения на ИС – наиболее подходящие источники опорного сигнала для большинства АЦП.
Выходные сигналы. Выходной цифровой сигнал АЦП характеризуется числом разрядов (разрешением) и типом используемого кода. Наибольшее распространение получили преобразователи с 8- и 12-разрядным разрешением. Однако имеется также достаточно широкий выбор преобразователей с разрешением 10 разрядов. 3  цифры двоично-десятичного кода, 14 и 16 разрядов. В униполярных преобразователях в качестве выходного кода чаще всего используется обычный двоичный код. Выходные сигналы преобразователей, специально разрабатываемых для измерительных приборов с цифровым отображением информации и цифровых мультиметров, практически всегда представляются в двоично-десятичном коде. Эти и другие широко используемые коды обсуждаются в разд. 4.1.
цифры двоично-десятичного кода, 14 и 16 разрядов. В униполярных преобразователях в качестве выходного кода чаще всего используется обычный двоичный код. Выходные сигналы преобразователей, специально разрабатываемых для измерительных приборов с цифровым отображением информации и цифровых мультиметров, практически всегда представляются в двоично-десятичном коде. Эти и другие широко используемые коды обсуждаются в разд. 4.1.
Управляющие сигналы. Для функционирования любого АЦП требуются синхронизирующий и некоторые управляющие сигналы. Представление об управляющих сигналах лучше всего получить, рассматривая один цикл преобразования типичного АЦП (рис. 5.4(6)). Внешнее устройство, с которым связан АЦП (например, микропроцессор), инициирует процесс преобразования путем переключения на мгновение входа START АЦП в состояние высокого уровня. В момент начала процесса преобразования АЦП переводит в состояние низкого уровня свою линию BUSY/EOC (АЦП занят/ Преобразование завершено). Таким образом, внешним устройствам сообщается, что идет процесс преобразования и что пока еще не следует вести поиск выходных данных и не следует инициировать новый цикл преобразования. По завершении текущего преобразования АЦП возвращает эту линию в исходное состояние высокого уровня. Этот переход, как правило, используется для генерации сигнала прерывания микропроцессора или какого-либо другого сигнала, сообщающего внешнему устройству о завершении преобразования. Внешнее устройство посылает в АЦП сигнал разрешения вывода (ОЕ), разрешающего АЦП выдачу выходного слова на шину данных. В преобразователях с более чем 8-разрядным разрешением сигнал ОЕ может разбиваться на два сигнала – разрешения вывода старшего байта (НВЕ) и разрешения вывода младшего байта (LBE), в результате чего выходное слово преобразователя может передаваться по 8-разрядной шине данных в виде двух последовательных посылок.








