 2020-08-05
2020-08-05 127
127На рис. 5.5(а) показана структурная схема АЦП с динамической компенсацией. В этом АЦП используется счетчик импульсов, который в процессе счета обеспечивает постепенное нарастание выходного сигнала связанного с ним ЦАП, пока этот сигнал не превысит уровень входного сигнала. Счетчик сбрасывается перед началом каждого преобразования и затем увеличивает свое содержимое на 1 при прохождении каждого тактового импульса. Выходной сигнал ЦАП при каждом единичном изменении состояния счетчика возрастает на величину МЗР, как показано на рис. 5.5(6). Компаратор останавливает счетчик, когда выходное напряжение ЦАП достигает уровня входного сигнала. Выходной сигнал (состояние) счетчика в этот момент как раз и является цифровым выходным сигналом АЦП. Главный недостаток этого простого способа аналого-цифрового преобразования – зависимость времени преобразования от уровня входного сигнала, причем это время может быть к тому же довольно велико (2  периодов тактовых импульсов для n-разрядного преобразователя в случае входного сигнала, близкого по уровню к величине полного диапазона).
периодов тактовых импульсов для n-разрядного преобразователя в случае входного сигнала, близкого по уровню к величине полного диапазона).
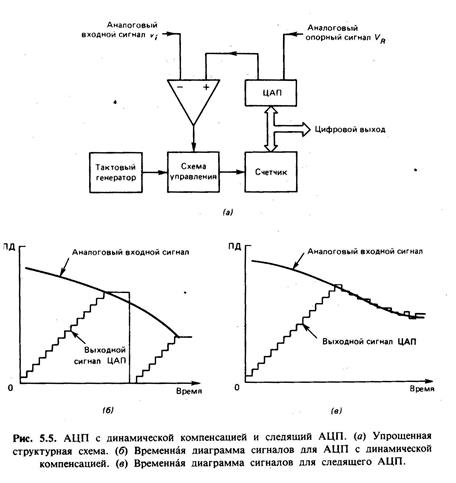
В модифицированном варианте АЦП с динамической компенсацией – так называемом «следящем» АЦП (или «серво-АЦП») – используется реверсивный счетчик, позволяющий ЦАП непрерывно отслеживать входной сигнал при условии, что изменения входного сигнала невелики. На рис. 5.5(в) иллюстрируется характер изменения выходного сигнала ЦАП в АЦП следящего типа. Останавливая счетчик подачей внешнего воздействия в нужный момент времени, мы можем использовать следящий АЦП в качестве УВХ с цифровым выходом и сколь угодно большим временем хранения. Допуская возможность счета или только в прямом, или только в обратном направлении, можно с помощью этого АЦП получать цифровой выходной сигнал, соответствующий максимальному или минимальному значению входного сигнала в данном временном интервале.








