 2020-09-24
2020-09-24 669
669Часть 4. электронные функциональные преобразователи
Разновидности электронных функциональных преобразователей
Дать всеобъемлющую классификацию электронных функциональных преобразователей (ФП) достаточно сложно. Практически любые возможные преобразования сигналов могут найти применение в системах управления. Многие простейшие ФП изучены в «Судовой электронике», например, нелинейные преобразователи, коммутаторы, ФЧВ, преобразователи U → I и I → U и т. д.; эти ФП лучше называть функциональными узлами. В этом разделе мы будем изучать более сложные ФП, выполняющие некоторую важную для системы автоматики функцию и состоящие, естественно, из ряда простейших функциональных узлов. Предпочтение отдается таким ФП, которые характерны для судовых СУ.
ФП, о которых пойдет речь, выполняют следующие задачи (это примерный, далеко не полный перечень, отражающий скорее личное представление):
1. Получение унифицированного измерительного сигнала в виде напряжения, пропорционального измеряемой величине (нормирующие преобразователи).
Выходным сигналом датчика может являться напряжение, ток, сопротивление, частота. Для дальнейшей обработки или отображения сигнал должен быть преобразован в напряжение и приведен у некоторому унифицированному диапазону (например, 0–10 В или ± 10 В).
Основной параметр преобразователя (настраиваемый) – коэффициент передачи. Кроме того, ФП выполняет, как правило, множество дополнительных функций:
– сдвиг нуля (если не требуется – настройка нуля);
– компенсация нелинейности (введением компенсирующей нелинейности, имеющей обратную функциональную зависимость);
– подавление помех (введение сглаживающего конденсатора);
– гальваническая развязка.
Если входной сигнал – напряжение, ФП есть усилитель (в редких случаях делитель).
Если входной сигнал – ток, ФП есть преобразователь I → U (изучали в «Судовой электронике»). Возможно с использованием схемотехнических приемов повысить качество преобразования (пример – активный трансформатор тока, рассмотрим далее).
Если входной сигнал – сопротивление, то чаще всего речь идет об измерении температуры или деформации. [Вообще измерение температуры – это отдельная тема, подробнее должна быть рассмотрена в курсе «Метрология, стандартизация и сертификация»]. Существует обширный класс схем – преобразователи R → U.
Если входной сигнал – частота, то используются преобразователи F → U (есть такой довольно объемный класс схем)
2. Обработка сигналов при косвенных измерениях (если невозможно прямое измерение с помощью датчиков). В системах управления судовых электростанций, например, требуется измерять активный ток, мощность и угол сдвига фаз.
3. Вывод измеренных сигналов на цифровой индикатор. Необходимо преобразовать напряжение в двоично-десятичный код и дешифровать код в сигналы управления индикатором. Кроме того, что индикатор должен отображать не напряжение, а реальное значение измеряемой величины. Дополнительно необходимо указать место децимальной точки.
4. Преобразования, связанные с временными параметрами сигналов (преобразователи напряжения в частоту или период, периода и частоты в напряжение, фазы в напряжение, напряжения в фазовый или временной сдвиг).
5. Допусковый контроль параметров; в случае выхода параметра за допустимые пределы – включение сигнализации (АПС) и формирование управляющих воздействий, например, команд защитного отключения. [Функции – сравнение, временная задержка, управление световыми (режим мигания) и звуковыми сигналами].
6. Обработка сигналов с целью повышения достоверности измерений (измерение одной величины несколькими датчиками с последующей математической обработкой).
Нормирующие преобразователи
4.2.1. Нормирующие преобразователи напряжения
Источник сигнала может выдавать переменное напряжение (например, сигнал с трансформатора напряжения судовой сети) или постоянное напряжение (датчик с выходным сигналом в виде напряжения). В первом случае используют прецизионный выпрямитель со сглаживающим фильтром для преобразования переменного напряжения в постоянное; во втором случае напряжение уже постоянное. Таким образом, во всех случаях нормирование сигнала ведется на постоянном токе. Задача заключается в установке необходимого коэффициента усиления и к подстройке нуля. На рис. 4.1 показан нормирующий преобразователь напряжения, представляющий собой обычный неинвертирующий усилитель с регулировками коэффициента передачи (R 1) и смещения нуля (R 2). Регулировки показаны грубо; на самом деле используется последовательное соединение постоянного и переменного сопротивлений, чтобы потенциометр регулировал параметр с высокой точностью в относительно узком диапазоне. Иногда для расширения функциональных возможностей (например, для выбора диапазона) используют переключаемые наборы сопротивлений, включаемых последовательно с
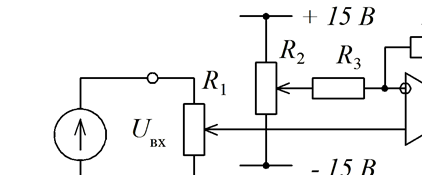 |
потенциометром.
4.2.2. Нормирующие преобразователи тока
Источником сигнала может быть трансформатор тока (сигнал с частотой сети) или датчик со стандартным токовым выходом (постоянный ток).
 |
Во всех случаях основным звеном является преобразователь тока в напряжение. Такие преобразователи рассмотрены в «Судовой электронике». Вспомним две наиболее простые схемы (рис. 4.2).
В случае переменного тока следующим звеном является прецизионный выпрямитель. При нормировании выполняются те же регулировки, что и в преобразователях напряжения: коэффициент передачи и установка нуля (сдвиг нуля).
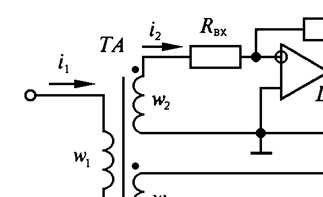 При измерении переменного тока может быть использован активный преобразователь тока в напряжение. Схема приведена на рис. 4.3.
При измерении переменного тока может быть использован активный преобразователь тока в напряжение. Схема приведена на рис. 4.3.
Вспомним: при рассмотрении трансформаторов тока говорилось, что основная погрешность трансформатора тока обусловлена МДС намагничивания. В данной схеме вследствие большого коэффициента усиления ОУ сигнал обмотки w 2 близок к нулю, а это возможно только при условии  Это значит, что МДС намагничивания практически полностью скомпенсирована за счет протекания тока в обмотке обратной связи w о.с. Выходной сигнал – ток, т.е. преобразователь является практически идеальным источником тока. Если в цепь тока i о.с включено сопротивление R н, то напряжение на нем i о.с∙ R н пропорционально i 1, и мы имеем преобразователь первичного тока в напряжение. Если же можно пренебречь падением напряжения на обмотке w о.с, то U вых = i о.с∙ R н.
Это значит, что МДС намагничивания практически полностью скомпенсирована за счет протекания тока в обмотке обратной связи w о.с. Выходной сигнал – ток, т.е. преобразователь является практически идеальным источником тока. Если в цепь тока i о.с включено сопротивление R н, то напряжение на нем i о.с∙ R н пропорционально i 1, и мы имеем преобразователь первичного тока в напряжение. Если же можно пренебречь падением напряжения на обмотке w о.с, то U вых = i о.с∙ R н.
Погрешность активных измерительных преобразователей с ОУ не превышает 1% погрешности измерительных трансформаторов тока.
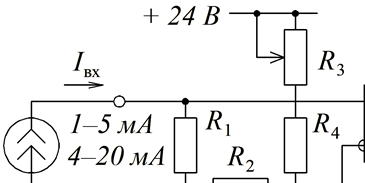 |
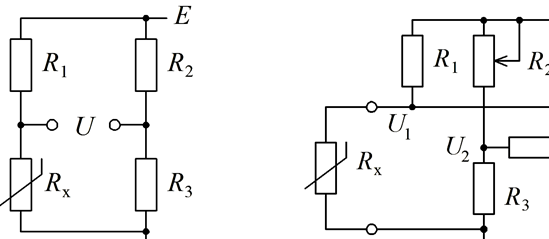
На рис. 4.4 показан пример преобразователя сигнала датчика с ненулевым началом шкалы. Собственно преобразование тока в напряжение происходит на резисторе R 1. Цепь R 3, R 4 сдвигает начало шкалы к нулю. Такой преобразователь используется в системе централизованного контроля (СЦК) параметров судовой силовой установки судов типа СТМ (проект «Атлантик-333»).
4.2.3. Преобразователи сопротивления в напряжение
В измерительных системах широко применяются резистивные первичные преобразователи, работа которых основана на изменении сопротивления под воздействием измеряемой величины. К ним относятся термометры сопротивления, тензометрические датчики, преобразователи линейных и угловых перемещений, влажности и т.п. Для вывода сигнала на измерительный прибор или ввода его в автоматическую систему необходим преобразователь сопротивления в напряжение (ПСН). Чаще всего преобразуемое сопротивление удалено от преобразователя на значительное расстояние. В этом случае необходимо оценивать погрешность, которую может внести сопротивление соединительных проводов, и при необходимости принимать меры по ее компенсации.
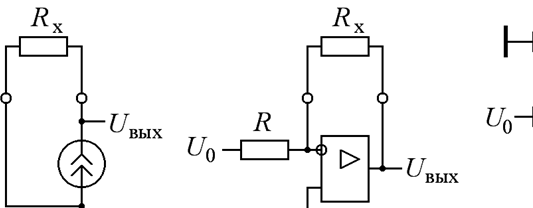 |
При неизменном токе падение напряжения на резисторе пропорционально его сопротивлению. Таким образом, ПСН можно выполнить, включая преобразуемое сопротивление в качестве нагрузки стабильного источника тока. Простейшая схема ПСН представлена на рис. 4.5, а. Ее недостатками являются ненулевое (к тому же переменное) выходное сопротивление, равное измеряемому сопротивлению R x, и наличие погрешности от сопротивления соединительных проводов. Поэтому такую схему применяют в случаях, когда преобразуемое сопротивление находится в непосредственной близости от преобразователя, и входное сопротивление приемника сигнала достаточно велико, например, в мультиметрах.
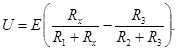
Весьма низкое выходное сопротивление можно получить, включив измеряемое сопротивление в цепь обратной связи ОУ (рис. 5,5, б). К резистору R приложено опорное напряжение U 0, поэтому ток через него равен U 0/ R. Но этот же ток протекает через сопротивление R х, поэтому выходное напряжение ОУ

В некоторых случаях недостатком схемы рис. 4.5, б может явиться то, что преобразуемое сопротивление не заземлено.
Преобразователь сопротивления, один вывод которого заземлен, может быть построен на базе преобразователя U → I, рассмотренного в курсе «Судовая электроника». Если вместо входного изменяющегося напряжения использовать стабильное опорное напряжение U 0, ПСН принимает вид, показанный на рис. 4.5, в. Здесь ОУ совмещает сразу несколько функций: является основой стабилизатора тока, усиливает напряжение на измеряемом сопротивлении и обеспечивает низкое выходное сопротивление. Выходное напряжение ПСН
У всех ПСН с двухпроводной соединительной линией сопротивление проводов суммируется с сопротивлением R х. Для устранения возникающей при этом погрешности применяется трех- и четырехпроводное соединение датчика с ПСН.
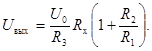
На рис. 4.6, а показано использование трехпроводного соединения. Сопротивление проводов линии обозначено r. Ток источника протекает последовательно по цепи r – R x – r – выход ОУ. Обозначим напряжение на верхнем по схеме выводе R x через U x, напряжение на выходе ОУ через U ОУ. Эти два напряжения связаны очевидными соотношениями:

Решая эти два уравнения совместно, находим: U x = – rI. Тогда
U вых = U x + I (r + R x) = IR x.
Таким образом, влияние соединительной линии полностью исключено. Выходное сопротивление рассмотренного ПСН равно R x, поэтому при работе на низкоомную нагрузку необходим буферный повторитель. Этот недостаток устранен в схеме с четырехпроводным соединением (рис. 4.6, б). Здесь напряжение на вход дифференциального усилителя подается непосредственно с R x, поэтому падение напряжения на сопротивлениях r 1 и r 4, вызванное протеканием тока I, исключено из контура измерения и не вносит погрешности. Входное сопротивление дифференциального усилителя, определяемое выбором сопротивлений R 1 – R 4, обычно составляет десятки или сотни кОм, что исключает влияние сопротивлений r 2 и r 3.
 |
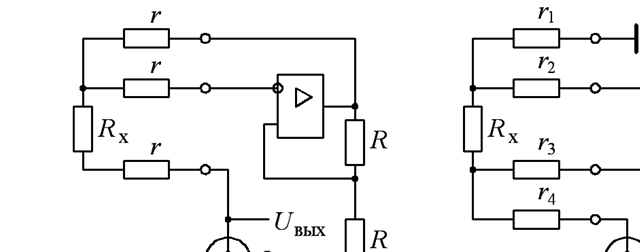
При измерении величин при помощи резистивных датчиков (термометры сопротивления, тензометрические датчики), как правило, нулевому значению параметра соответствует ненулевое сопротивление. В этом случае выходное напряжение нормирующих преобразователей должно быть пропорционально не самому сопротивлению, а его изменению. Традиционно для этой цели используется мостовая измерительная схема (рис. 4.7, а). Выходным сигналом является напряжение U в диагонали моста.
Анализ схемы дает:
Сопротивление R x нормируется при нулевом значении измеряемой величины (0 °С или отсутствие деформации). Поэтому удобно представить
R x = R 0 +Δ R,
где R 0 = сопротивление термометра при нулевом значении параметра. Тогда
Очевидно, что настройка моста должна обеспечивать U = 0 при Δ R = 0. Это достигается при

При такой настройке
Видим, что U примерно пропорционально Δ R. Однако наличие Δ R в знаменателе вносит нелинейность. Примем за эталонную характеристику линейную зависимость, которую получаем, пренебрегая Δ R в знаменателе:
Тогда относительная погрешность
Видно, что погрешность всегда отрицательна и увеличивается вместе с отклонением сопротивления.
Отметим преимущества мостовых схем:
- дрейф напряжения питания не влияет на настройку нуля;
- выходное напряжение пропорционально не сопротивлению, а изменению сопротивления; это повышает чувствительность по сравнению с рассмотренными ранее схемами измерения сопротивления на основе закона Ома: там малому изменению сопротивления соответствует малое изменение выходного напряжения.
Недостатком моста является дифференциальный выход. Если разбаланс моста измеряется показывающим прибором, это не имеет значения. Но если необходимо получить электрический сигнал, пригодный для последующей обработки, следует подать напряжение с диагонали моста на электронный усилитель с дифференциальным входом и большим входным сопротивлением.
На рис. 4.7, б показан нормирующий преобразователь сопротивления, использующийся в той же СЦК СТМ.
Точный анализ схемы несложен, но дает громоздкое решение. Примем для упрощения, что R 4 >> R 3. В схеме с ОУ это нетрудно сделать, учитывая, что типичное сопротивление термометра порядка 100 Ом; следовательно, и R 3 того же порядка. Обозначим напряжения в точках диагонали моста U 1 и U 2. Тогда

Отсюда, обозначая R 5/ R 4 = K, получаем:

Точно так же потребуем, чтобы при Δ R = 0 U вых равнялось нулю. Условие этого:
Тогда

Видим, что выражение для U вых по форме такое же, как для отдельного моста, но появляется усиление в 1+ К раз, выходное сопротивление практически нулевое, и выход не дифференциальный. За счет усиления появляется возможность увеличить R 1 для уменьшения нелинейности, а получающееся при этом уменьшение сигнала компенсируется множителем (1+ К).
4.2.4. Нормирующий преобразователь сигнала термопары
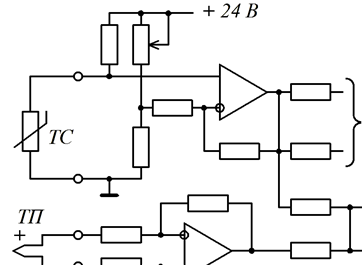
Нормирующий преобразователь сигнала термопары (рис. 4.8) представляет собой обычный усилитель с достаточно большим коэффициентом усиления (ЭДС термопары составляет порядка 40–80 мкВ/°С). ЭДС пропорциональна разности температур рабочего спая и свободных концов, поэтому выходной сигнал усилителя необходимо сложить с сигналом температуры свободных концов.
Температура свободных концов измеряется термометром сопротивления, который устанавливается обычно в том же месте, куда выведены провода термопары. Один преобразователь сопротивления используется для всех термопар, выведенных в данное место.








