 2020-09-24
2020-09-24 149
149В системах управления судовыми электростанциями типичной операцией является измерение активной мощности. Это необходимо для следующих целей:
1. Определение степени загрузки дизель-генераторных агрегатов (ДГА). Типичной для судовых электростанций является параллельная работа ДГА. Известно, что наиболее экономичной является такая работа силовых агрегатов, когда их нагрузка близка к 100% от номинальной. При недогрузке необходимо вывести какой-либо генератор из работы и остановить. При нагрузке, близкой к предельной, если планируется дополнительное подключение мощных потребителей, необходимо ввести в параллель дополнительные ДГА.
2. При параллельной работе ДГА необходимо равномерно распределить между ними нагрузку (аналогия с параллельно включенными диодами).
3. Контроль возникновения режима обратной мощности, который является аварийным для ДГА.
Во всех этих случаях необходимо измерение активной мощности P = S cos φ. В некоторых случаях измеряют только активный ток I a = I cos φ. Так как напряжение в судовой сети весьма стабильно (за это отвечают системы регулирования напряжения), то активная мощность пропорциональна активному току в соответствии с выражением P = UI cos φ.
Рассмотрим способы получения сигнала активной мощности (тока).
1. 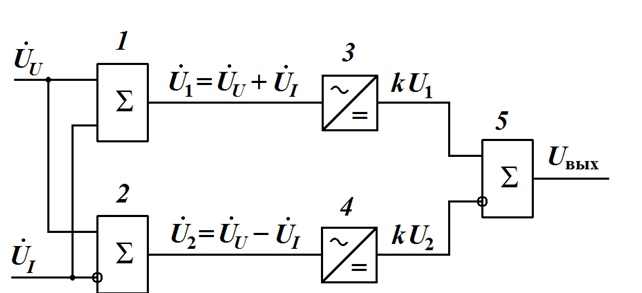
Определение разности амплитуд синусоидальных сигналов, полученных векторным сложением и вычитанием сигналов тока и напряжения. Структура устройства показана на рис. 4.22, а. На входы устройства подаются два синусоидальных сигнала:  и
и  , пропорциональные соответственно напряжению и току в цепи. Сумматор 1 выполняет сложение входных сигналов, сумматор 2 – их вычитание. Эти операции в соответствии с символическим методом анализа цепей переменного тока могут быть представлены как операции над векторами, поэтому такие устройства иногда называют векторомерными. Выпрямители 3 и 4 преобразуют амплитуду синусоидального сигнала, подаваемого на их вход, в постоянное напряжение. На выходе сумматора 5 формируется разность амплитуд; в простейшем случае в качестве выходного можно использовать дифференциальный сигнал – разность напряжений на выходах выпрямителей 3 и 4. На рис. 4.22, б представлены векторные диаграммы устройства.
, пропорциональные соответственно напряжению и току в цепи. Сумматор 1 выполняет сложение входных сигналов, сумматор 2 – их вычитание. Эти операции в соответствии с символическим методом анализа цепей переменного тока могут быть представлены как операции над векторами, поэтому такие устройства иногда называют векторомерными. Выпрямители 3 и 4 преобразуют амплитуду синусоидального сигнала, подаваемого на их вход, в постоянное напряжение. На выходе сумматора 5 формируется разность амплитуд; в простейшем случае в качестве выходного можно использовать дифференциальный сигнал – разность напряжений на выходах выпрямителей 3 и 4. На рис. 4.22, б представлены векторные диаграммы устройства.
Проведем анализ зависимости U вых(φ) [если не дан на ЛР].
Обозначим (как и показано на рис.) 
Действующие значения напряжений U 1 и U 2 находим по теореме косинусов:

Считаем, что выпрямители 3 и 4 прецизионные. Для любой схемы прецизионного выпрямителя известен коэффициент преобразования k из действующего значения переменного входного напряжения в постоянное входное.
Тогда U вых = k (U 1 – U 2).

Из полученного выражения не виден характер зависимости U вых от интересующей нас активной составляющей тока UI cosφ. Наложим условие: U U >> UI. Вынесем  за скобку. Получим:
за скобку. Получим:

При подкоренном выражении, близком к 1, имеет место приближенное соотношение: 
Тогда
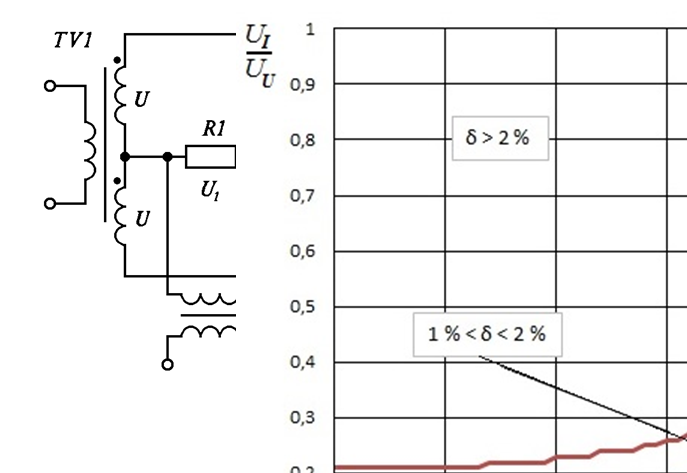
Погрешность приближения зависит от отношения UI / UU и от cos φ. На графике рис. 4.23 показаны области сочетаний параметров, при которых погрешность находится в том или ином диапазоне. Для примера выбраны границы диапазонов 1 % и 2 %. Как видно, чем ближе cos φ к единице, тем менее жестко выглядит требование U 1 << U.
На рис. 4.24 представлен вариант реализации этого принципа, примененный в системе управления СЭЭС «Ижора».
Преобразователь состоит из трансформатора тока ТА1, трансформатора напряжения TV1,двух одинаковых вторичных трансформаторов напряжения TV2, TV3 и схемы сравнения напряжений на выпрямителях V1, V2 и двух одинаковых резисторов R2 = R3 = R. Нагрузкой трансформатора тока ТА1 является резистор R1, т. е. напряжение U 1 пропорционально току.
2.
 |
Фазочувствительный выпрямитель (ФЧВ) сигнала тока. Принцип работы ФЧВ рассмотрен в «Судовой электронике». Напомним его (рис. 4.25). Сигнал тока – это входной сигнал. Управляющий сигнал – напряжение той же фазы, что и ток. Иногда синусоидальное управляющее напряжение преобразуют в прямоугольное.
Пусть U c = U m sin(ωt + φ). Среднее значение выходного напряжения за период получаем, интегрируя входное напряжение за один полупериод: тот, в течение которого ключ замкнут:
 (4._)
(4._)
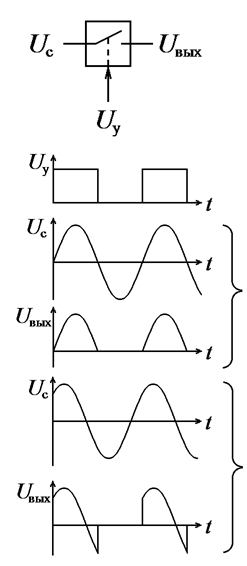 Таким образом, если U m пропорционально току, то U ср пропорционально активному току. Сигнал пульсирующий, поэтому его среднее значение (постоянная составляющая) должна быть выделено с помощью ФНЧ.
Таким образом, если U m пропорционально току, то U ср пропорционально активному току. Сигнал пульсирующий, поэтому его среднее значение (постоянная составляющая) должна быть выделено с помощью ФНЧ.
На судах широкое распространение получили диодно-трансформаторные ФЧВ; два варианта приведены в УП по СЭ. В Жадобине (рис. 4.83) приведена схема измерительного преобразователя активного тока, который, отличаясь в деталях, принципиально совпадает с рис.3.20, а в УП по СЭ. Эта же схема широко применяется в радиотехнике, ее называют балансный модулятор.
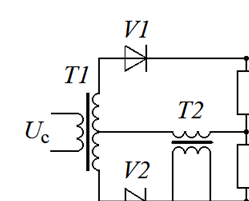 Напряжение, пропорциональное току, поступает на первичную обмотку трансформатора Т1. Напряжение вторичной обмотки трансформатора Т2 много больше сигнала, поступающего с трансформатора Т1. Положительная (условно) полуволна напряжения трансформатора Т2 отпирает диоды, и напряжение вторичной обмотки трансформатора Т1 поступает на выход устройства. Ток вторичной обмотки трансформатора Т2 протекает по двум параллельным одинаковым цепям, поэтому этот ток создает одинаковые встречно направленные падения напряжения на резисторах R1 и R2. В результате ток трансформатора Т2 не вызывает появления выходного напряжения, его роль – только отпирать и запирать диоды. Отрицательная полуволна напряжения трансформатора Т2 запирает диоды, и U вых = 0. Таким образом, диоды играют роль полупроводниковых ключей.
Напряжение, пропорциональное току, поступает на первичную обмотку трансформатора Т1. Напряжение вторичной обмотки трансформатора Т2 много больше сигнала, поступающего с трансформатора Т1. Положительная (условно) полуволна напряжения трансформатора Т2 отпирает диоды, и напряжение вторичной обмотки трансформатора Т1 поступает на выход устройства. Ток вторичной обмотки трансформатора Т2 протекает по двум параллельным одинаковым цепям, поэтому этот ток создает одинаковые встречно направленные падения напряжения на резисторах R1 и R2. В результате ток трансформатора Т2 не вызывает появления выходного напряжения, его роль – только отпирать и запирать диоды. Отрицательная полуволна напряжения трансформатора Т2 запирает диоды, и U вых = 0. Таким образом, диоды играют роль полупроводниковых ключей.
Как видим, балансные модуляторы (как и рассмотренные выше векторомерные преобразователи) формируют выходной сигнал, зависящий от фазы входного сигнала. Поэтому такие преобразователи используют в качестве фазовых детекторов. При этом возникает неудобство: функция cos φ имеет близкий к линейному характер только вблизи φ = 90°. Для устранения этого недостатка смещают начало отсчета фазы (фаза всегда относительна!). Например, можно управляющий сигнал сдвинуть по фазе на 90° при помощи фазосдвигающего устройства (в простейшем случае это RC -цепь).
3. Произведение p (t) = u (t)· i (t) – это сигнал мгновенной мощности. Напомним: в ТОЭ понятие активной мощности введено как среднее за период значение мгновенной мощности. Определим среднее значение p (t).

Используем известное тригонометрическое тождество

Тогда
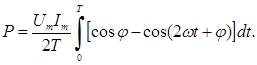
Интеграл от второго слагаемого равен нулю. Поэтому

Точно так определена активная мощность в ТОЭ. Таким образом, устройство, вычисляющее активную мощность, должно содержать перемножитель и ФНЧ.








