 2020-09-24
2020-09-24 244
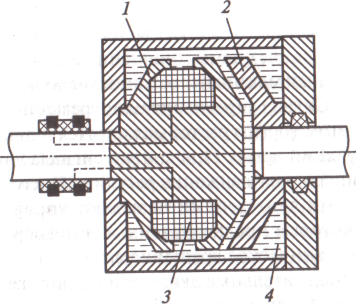
244На ведущем валу 1 устанавливают полумуфту с индуктором 3 в виде электромагнита постоянного тока с катушкой возбуждения 6 и полюсами 7. На ведомом валу закреплена полумуфта с якорем 4 в виде роторной клетки асинхронного двигателя. Ток к катушке 6 подается через щетки и контактные кольца 2. При вращении ведущего вала магнитное поле индуктора 3 вращается относительно якоря 4, наведя в нем токи, которые, взаимодействуя с магнитным полем индуктора, создают крутящий момент. Якорь и вал 5 начинают вращаться. При отключении тока вращение якоря прекращается. Имеются конструкции не только с наружным, но и с внутренним расположением якоря.
Достоинством рассмотренной конструкции является её высокая надежность, а также возможность плавно регулировать передаваемый момент за счет изменения напряжения питания.
Порошковые муфты.
| Рис. 79. Электромагнитная порошковая муфта. 1. Ведущая полумуфта. 2. Ведомая полумуфта. 3. Обмотка. 4. Ферромагнитнаясреда. |
Ферропорошковые или магнитоэмульсионные муфты работают по принципу намагничивания ферромагнитной среды, заполняющей пространство между полумуфтами 1 и 2 (рис.79). Ферромагнитная среда 4 представляет собой обычно смесь порошка карбонильного или кремнистого железа и смазывающего вещества (тальк, графит, масло), улучшающего проскальзывание полумуфт при холостом ходе и уменьшающего истирание ферропорошка. При подаче тока в обмотку 3 ведущей полумуфты 1 возникает магнитное поле, намагничивающее отдельные частички железного порошка, которые слипаются между собой, увеличивая вязкость ферромагнитной среды. Ведомая полумуфта 2 начинает вращаться, передавая вращение на объект управления. Вязкость ферромагнитной среды зависит от силы тока в обмотке, следовательно, можно при росте тока увеличивать передаваемый крутящий момент.
Таким образом, муфты вязкого трения являются управляемыми, т. е. позволяют плавно регулировать вращающий передаваемый момент а следовательно, и частоту вращения ведомого вала.
Тема 5.4. Электродвигательные исполнительные
Устройства.
Исполнительными электродвигателями называют управляемые двигатели малой мощности, которые предназначены для преобразования электрического сигнала в механическое вращение вала.
Как правило, исполнительные двигатели имеют две обмотки: возбуждения и управления.
Обмотки возбуждения постоянно находятся под напряжением, а на обмотку управления сигнал подается лишь тогда, когда необходимо получить вращение вала.
Так как исполнительные двигатели работают в схемах управления, то для них в основном характерны пуски, остановки или реверсы. В настоящее время в качестве исполнительных двигателей используют двухфазные асинхронные, трёхфазные асинхронные, синхронные шаговые двигатели и двигатели постоянного тока.








