 2020-09-24
2020-09-24 196
196Этот способ даёт ступенчатую регулировку.
 При р=1, n1 = 3000 об/мин, р=2, n1 = 1500 об/мин, р=3, n1 = 750 об/мини т.д.
При р=1, n1 = 3000 об/мин, р=2, n1 = 1500 об/мин, р=3, n1 = 750 об/мини т.д.
Для изменения числа пар полюсов на статор укладыают несколько обмоток с разныи числом пар полюсов n1 =f1×60/p
Регулировать скорость вращения двигателя можно изменением частоты тока статора n1 =f1×60/p.
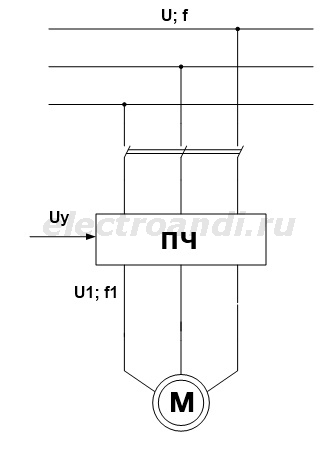
Для этого используется преобразователь частоты.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Недостаток заключается в дороговизне частотного регулятора.
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
В настоящее время выпускаются статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора.
Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода).
Потери и КПД асинхронных двигателей.
КПД определяется по формуле
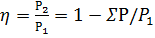
Сумма всех потерь в АД

КПД асинхронных двигателей мощностью 1 – 10 кВт η = 75- 88%,
для двигателей более 10 кВт η = 90- 94%
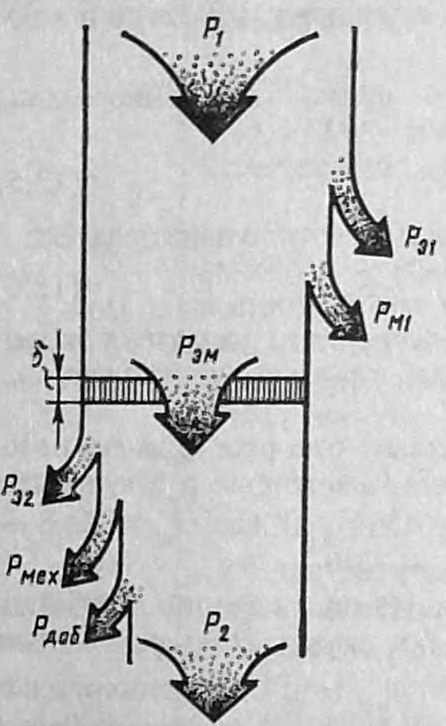
Энергетическая диаграмма асинхронного двигателя.
Фазное напряжение двигателя
 при соединении обмотки статора звезда
при соединении обмотки статора звезда
Полная мощность, потребляемая АД









