2020-10-10
2020-10-10 467
467Задание на курсовой проект
Данная тема курсового проекта была выбрана с целью модернизации управления приводом фрезерного станка с ЧПУ и большей ее автоматизации с целью минимизации контакта человека (оператора), для уменьшения брака на производстве. В данном курсовом проекте необходимо изучить будет систему автоматического управления приводом фрезерного станка с ЧПУ.
3.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 8 |
| ПКТУ.КП 03.03 003 ПЗ |
Система автоматического управления скоростью резания при точении
Фрезерный станок с ЧПУ предназначен для обработки сложных различных поверхностей деталей машин. Точность и производительность станков с ЧПУ определяется точностью и быстродействием приводов подачи формообразующих движений. Для повышения точности обработки (или при той же точности для повышения производительности) применяют замкнутые системы автоматического управления приводом подач.
1. Конструктивная схема системы автоматического управления:
Деталь 1 устанавливается на столе 2, которому сообщается движение подачи в двух взаимно перпендикулярных направлениях для формирования фрезой 3 требуемой формы паза. На рисунке показан только один привод стола 2. Он состоит из приводного двигателя 4 постоянного тока с тахогенератором 5, редуктора 6 и винта 7. Кроме того, в систему автоматического управления входят также преобразователь перемещения 8, сравнивающие устройства 9 и 10, усилитель 11 и тиристорный преобразователь 12. САУ работает следующим образом. Сигнал, вырабатываемый системой ЧПУ, через цифро-аналоговый преобразователь (на схеме не показан) в виде напряжения  поступает на вход сравнивающего устройства 9. На другой вход сравнивающего устройства 9 поступает сигнал
поступает на вход сравнивающего устройства 9. На другой вход сравнивающего устройства 9 поступает сигнал  преобразователя перемещения 8. Напряжение
преобразователя перемещения 8. Напряжение  ошибки через усилитель 11 поступает на вход сравнивающего устройства 10. На другой вход сравнивающего устройства 10 поступает напряжение, вырабатываемое тахогенератором 5. Таким образом, напряжение на входе тиристорного преобразователя 12 определяет скорость вращения двигателя 4, а следовательно, и величину подачи стола 2. Система автоматического управления приводом подачи сообщает столу 2 и детали 1 движение по одной из управляемых координат в соответствии с напряжением задания. Аналогичным образом работает привод подачи по другой координате. В результате сложного движения детали 1 фрезой 3 формируется требуемый контур.
ошибки через усилитель 11 поступает на вход сравнивающего устройства 10. На другой вход сравнивающего устройства 10 поступает напряжение, вырабатываемое тахогенератором 5. Таким образом, напряжение на входе тиристорного преобразователя 12 определяет скорость вращения двигателя 4, а следовательно, и величину подачи стола 2. Система автоматического управления приводом подачи сообщает столу 2 и детали 1 движение по одной из управляемых координат в соответствии с напряжением задания. Аналогичным образом работает привод подачи по другой координате. В результате сложного движения детали 1 фрезой 3 формируется требуемый контур.
В качестве объекта управления в САУ приводом входят процесс резания и замкнутая технологическая система станка.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 9 |
| ПКТУ.КП 03.03 003 ПЗ |
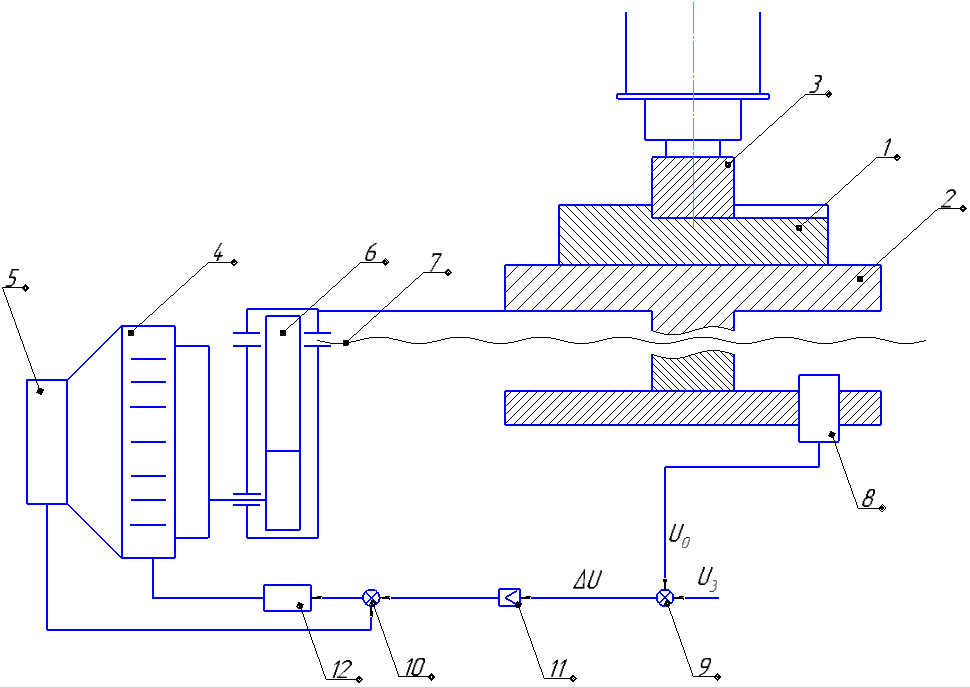
Рис.1 Конструктивная схема системы автоматического управления приводом фрезерного станка с ЧПУ
1 – Деталь;
2 – Стол;
3 – Фреза;
4 – Приводной двигатель;
5 – Тахогенератор;
6 – Редуктор;
7 – Винт;
8 – Преобразователь перемещения;
9, 10 – Сравнивающее устройство;
11 – Электронный усилитель;
12 – Тиристорный преобразователь.
2.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 10 |
| ПКТУ.КП 03.03 003 ПЗ |
| Передаточное звено | Дифференциальные уравнения и передаточные функции звеньев | Параметры дифференциального уравнения |
| ЭУ (W1) | 
|  
|
| ТП(W2) | 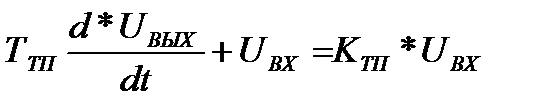
| 
|
| М (W3) | 
|   
|
| ТГ (W4) | 
|  (Вс) (Вс)
|
| МР (W5) | 
| 
|
| ПР (W6) | 
|  
|
| ТСС (W7) | 
| 
|
| ПП (W8) | 
| 
|
3.2.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 11 |
| ПКТУ.КП 03.03 003 ПЗ |
В качестве  объекта управления САУ включает в себя процесс подачи стола.
объекта управления САУ включает в себя процесс подачи стола.
Соединяя элементы САУ между собой, в соответствии с их функциональным назначением и схемой САУ окончательно получаем её функциональную схему.
ЭУ - Электронный усилитель
ТП - Тиристорный усилитель-преобразователь
М - Электродвигатель постоянного тока
ТГ - Тахогенератор
МР - Редуктор
ПР - Процесс резания
ТСС - Эквивалентная упругая система станка
ПП - Преобразователь линейного перемещения
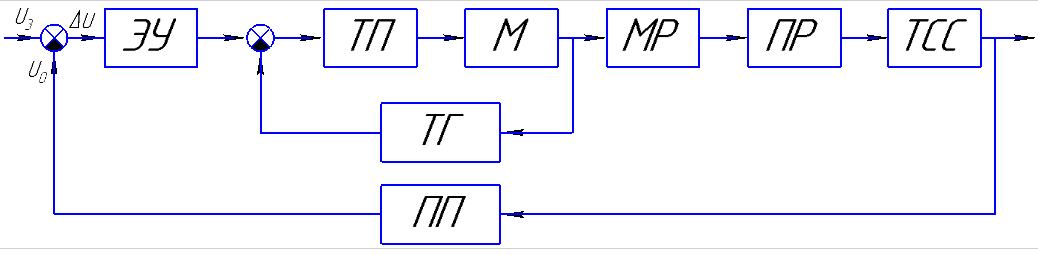
Рис.2 Функциональная схема автоматического управления приводом фрезерного станка с ЧПУ
3.3.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 12 |
| ПКТУ.КП 03.03 003 ПЗ |
Следующим этапом является определение передаточных функций всех звеньев системы автоматического управления (САУ). Для этого воспользуемся уравнениями движения элементов.
1. Электронный усилитель описывается уравнением
 (1)
(1)
где:
 - постоянная времени электронного усилителя;
- постоянная времени электронного усилителя;
 - выходное напряжение, В;
- выходное напряжение, В;
 - входное напряжение, В;
- входное напряжение, В;
 - коэффициент усиления.
- коэффициент усиления.
Получим передаточную функцию:
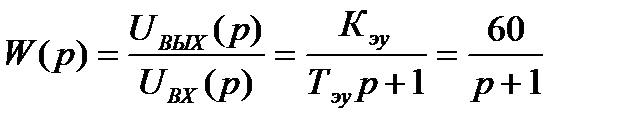
Это звено соответствует апериодическому звену первого порядка.
2. Тиристорный усилитель-преобразователь описывается уравнением
 (2)
(2)
где:
 - постоянная выхода тиристорного преобразователя;
- постоянная выхода тиристорного преобразователя;
 - выходное напряжение;
- выходное напряжение;
 - входное напряжение;
- входное напряжение;
 - коэффициент передачи (усилия)
- коэффициент передачи (усилия)
Получим передаточную функцию:

Это звено соответствует апериодическому звену первого порядка.
3. Электродвигатель постоянного тока описывается уравнением:
 (3)
(3)
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 13 |
| ПКТУ.КП 03.03 003 ПЗ |
 - электромагнитная постоянная времени;
- электромагнитная постоянная времени;
 - электромеханическая постоянная времени;
- электромеханическая постоянная времени;
 - коэффициент пропорциональности между обратной ЭДС и угловой скоростью;
- коэффициент пропорциональности между обратной ЭДС и угловой скоростью;
 - напряжение якоря.
- напряжение якоря.
Получим передаточную функцию:

4. Тахогенератор описывается уравнением:
 (4)
(4)
где:
 - выходное напряжение тахогенератора;
- выходное напряжение тахогенератора;
 - коэффициент передачи;
- коэффициент передачи;
 - угловая скорость входного вала.
- угловая скорость входного вала.
Получаем передаточную функцию:

5. Редуктор описывается уравнением:
 (5)
(5)
где:
 - угловая скорость выходного звена редуктора;
- угловая скорость выходного звена редуктора;
 - угловая скорость входного звена редуктора;
- угловая скорость входного звена редуктора;
 - коэффициент передачи.
- коэффициент передачи.
Получим передаточную функцию:
6. Процесс резания описывается уравнением:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 14 |
| ПКТУ.КП 03.03 003 ПЗ |
 (6)
(6)
где:
 - силовой параметр процесса резания;
- силовой параметр процесса резания;
 - постоянная времени стружкообразования;
- постоянная времени стружкообразования;
 - регулируемый параметр процесса;
- регулируемый параметр процесса;
 - коэффициент пропорциональности.
- коэффициент пропорциональности.
Таким образом, правая часть уравнения представляет собой линеаризованную зависимость силового параметра от регулируемого параметра в окрестности установившегося значения параметров процесса.
Так, при точении, для определения правой части в случае, если  следует воспользоваться формулой зависимости резания металла:
следует воспользоваться формулой зависимости резания металла:
 (7)
(7)
Получим передаточную функцию:

7. Эквивалентная упругая система станка описывается дифференциальным уравнением второго порядка:
 (8)
(8)
где:
 - собственная частота колебаний;
- собственная частота колебаний;
 - коэффициент затухания колебаний;
- коэффициент затухания колебаний;
 - деформация упругой системы станка;
- деформация упругой системы станка;
 - жёсткость упругой системы станка;
- жёсткость упругой системы станка;
 - входной силовой параметр.
- входной силовой параметр.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 15 |
| ПКТУ.КП 03.03 003 ПЗ |
8. Преобразователь линейного перемещения описывается уравнением:
(9)
где:
 - выходное напряжение преобразователя, В;
- выходное напряжение преобразователя, В;
 - коэффициент передачи, В/мм;
- коэффициент передачи, В/мм;
 - входное перемещение, мм
- входное перемещение, мм
Получим передаточную функцию:

3.4.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 16 |
| ПКТУ.КП 03.03 003 ПЗ |
Зная передаточные функции всех звеньев системы автоматического управления и связи между ними, составим структурную схему системы автоматического управления.

Рис.3 Структурная схема системы автоматического управления приводом фрезерного станка с ЧПУ
3.5.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 17 |
| ПКТУ.КП 03.03 003 ПЗ |
Структурная схема разомкнутой системы автоматического управления.

Рис.4 Структурная схема системы автоматического управления приводом фрезерного станка с ЧПУ.
Чтобы определить устойчивость системы необходимо определить передаточную функцию разомкнутой системы автоматического управления. Передаточная функция разомкнутой системы автоматического управления показана на рисунке.
|
|
Проанализировав выражение передаточной функции разомкнутой системы автоматического управления (САУ) получили, что система не может быть представлена в виде простых сомножителей. Исходя из этого определение критерия устойчивости будет определятся по критерию Найквиста.
Подставим исходные данные в выражение передаточной функции разомкнутой системы:

Выполнив алгебраическое преобразование получим:

Раскрыв скобки получим выражение передаточной функции в виде отношения полиномов:

Найдем частотную передаточную функцию разомкнутой системы.
Частотная передаточная функция является комплексным числом, модуль которого равен отношению амплитуды выходной величины к амплитуде входной, а аргумент – сдвига фаз выходной величины по отношению к входной.

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 18 |
| ПКТУ.КП 03.03 003 ПЗ |
 , где
, где 

Умножив числитель и знаменатель, на число сопряженное знаменателю учитывая, что комплексные числа умножаются по правилу умножения многочленов с заменой  .
.
Полученные результаты расчетов занесем в таблицу.
Таблица №1
Частотная передаточная функция разомкнутой системы
| W | Re | Im |
| 0 | 19640 | 0 |
| 5 | 19637,90398 | 166,939649 |
| 20 | 19606,69908 | 667,7371159 |
| 1000 | 6412762 | 30524,0014 |
| 2000 | 183524128 | 43864,00279 |
| 3000 | 1336007738 | 22836,00419 |
| 4500 | 9849047517 | -110735,9937 |
| 7500 | 1,23588Е+11 | -957839,9895 |
| 8000 | 1,70257Е+11 | -1199263,989 |
| 10000 | 5,15932E+11 | -2530119,986 |
| 12500 | 1,56558E+12 | -5176399,983 |
| 14000 | 2,75234E+12 | -7391383,98 |
| 15500 | 4,56942E+12 | -10147663,98 |
По данным таблицы построим график АФЧХ (линия 1). График АФЧХ показан на рисунке ниже.
Рис.5 График АФЧХ разомкнутой системы
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 19 |
| ПКТУ.КП 03.03 003 ПЗ |
Проанализировав график АФЧХ разомкнутой системы, видим, что данная система автоматического управления (САУ) является устойчивой, так как график не охватывает точку с координатами (-1;0), как показано на рисунке ниже.
4.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 20 |
| ПКТУ.КП 03.03 003 ПЗ |
Для построения переходной функции определим передаточную функцию замкнутой САУ.

После преобразования получим:

Поставим исходные данные и выполнив необходимые алгебраические преобразования получим:

Помножив числитель и знаменатель полученного выражения на число, сопряженное знаменателю, используя правило перемножения комплексных чисел, получим окончательное выражение частотной передаточной функции замкнутой системы.

Для определения частотной передаточной функции замкнутой системы подставим
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 21 |
| ПКТУ.КП 03.03 003 ПЗ |

Для построения переходной характеристики замкнутой системы автоматического управления (САУ) методом вещественных частотных трапецеидальных необходимо построить график вещественной части передаточной функции замкнутой системы в функции от частоты при изменении последней от +0 до +  .
.
Данные для построения графика вещественной части передаточной функции замкнутой системы указаны в таблице.
Таблица №2
Данные для построения графика вещественной части передаточной функции замкнутой системы.
| W | P[W] | Числитель | Знаменатель |
| 0 | 14,28571429 | 2,93E+20 | 2,051E+19 |
| 15 | -4627736780 | 2,93E+20 | -63313883092 |
| 100 | -694322933,9 | 2,92999E+20 | -4,21993E+11 |
| 1000 | -90947409,32 | 2,92935Е+20 | -3,22093Е+12 |
| 2000 | 38731935,35 | 2,92741Е+20 | 7,55814Е+12 |
| 3000 | 4279041,452 | 2,92418Е+20 | 6,83372Е+13 |
| 4000 | 1221016,107 | 2,91965Е+20 | 2,39116Е+14 |
| 5000 | 482504,9883 | 2,91383Е+20 | 6,03895Е+14 |
| 6000 | 228753,1791 | 2,90671Е+20 | 1,27067Е+15 |
| 7000 | 122216,0632 | 2,8983Е+20 | 2,37145Е+15 |
| 8000 | 71108,48609 | 2,88859Е+20 | 4,06223Е+15 |
| 9500 | 35430,24277 | 2,87161Е+20 | 8,10496Е+15 |
| 10000 | 28774,45544 | 2,8653Е+20 | 9,95779Е+15 |
| 10015 | 28599,97126 | 2,86511Е+20 | 1,00179Е+16 |
| 10030 | 28426,80043 | 2,86491E+20 | 1,00782E+16 |
| 10045 | 28254,9311 | 2,86472E+20 | 1,01388E+16 |
| 10060 | 28084,35156 | 2,86452E+20 | 1,01997E+16 |
| 10075 | 27915,05023 | 2,86433E+20 | 1,02609E+16 |
|
|
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 22 |
| ПКТУ.КП 03.03 003 ПЗ |
Рис.6 График вещественной части передаточной функции замкнутой системы.
Полученную линию следует заменить прямыми и составить из них трапеции таким образом, чтобы при сложении ординат всех трапеций получился исходный график. В результате чего мы получим
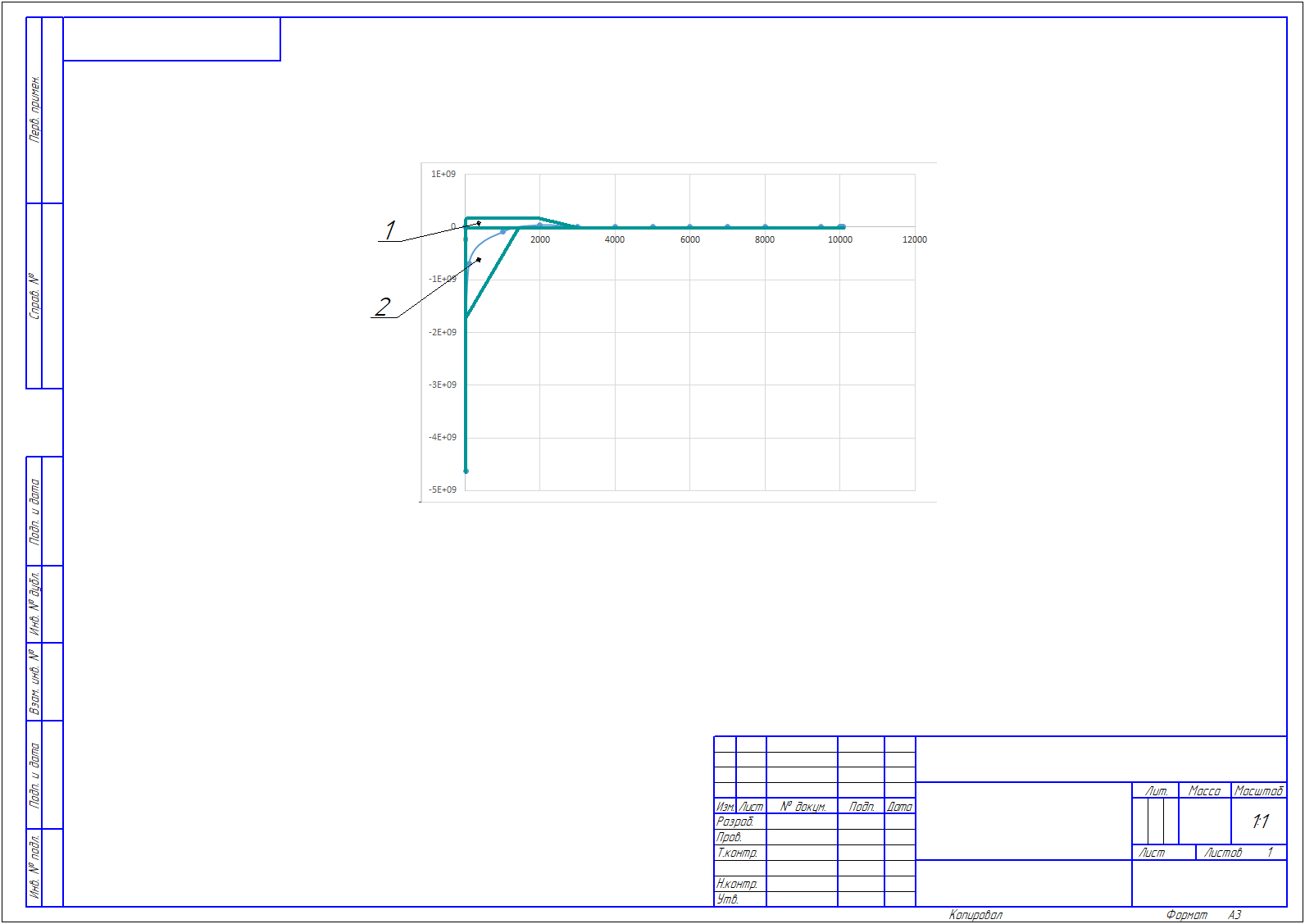
Рис. 7 Трапеции
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 23 |
| ПКТУ.КП 03.03 003 ПЗ |
Данные для построения графика переходной характеристики системы автоматического управления САУ
|
|
|
| ||||||
| h | t | H*h | h | t | H*h | H*h | t | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0,5 | 0,248 | 0,00047 | 888,83 | 0,138 | 0,0012 | -230,18 | 658,65 | 0,00167 |
| 1 | 0,476 | 0,00093 | 1705,98 | 0,31 | 0,0023 | -517,08 | 1188,9 | 0,00323 |
| 1,5 | 0,685 | 0,0014 | 2455,04 | 0,449 | 0,0035 | -748,93 | 1706,11 | 0,0049 |
| 2 | 0,856 | 0,0019 | 3067,91 | 0,572 | 0,0047 | -954,1 | 2113,81 | 0,0066 |
| 2,5 | 0,985 | 0,0023 | 3530,24 | 674 | 0,0058 | -1124,23 | 2406,01 | 0,0081 |
| 3 | 1,082 | 0,0028 | 3877,89 | 0,755 | 0,007 | -1259,34 | 2618,55 | 0,0098 |
| 3,5 | 1,132 | 0,0033 | 4057,09 | 0,783 | 0,0081 | -1306,04 | 2751,05 | 0,0114 |
| 4 | 1,152 | 0,0037 | 4128,77 | 0,857 | 0,0093 | -1429,48 | 2699,29 | 0,013 |
| 4,5 | 1,138 | 0,0042 | 4078,59 | 0,883 | 0,0104 | -1472,84 | 2605,75 | 0,0146 |
| 5 | 1,115 | 0,0047 | 4121,6 | 0,896 | 0,0117 | -1494,53 | 2627,07 | 0,0164 |
| 5,5 | 1,083 | 0,0051 | 3881,47 | 0,9 | 0,0128 | -1501,2 | 2380,27 | 0,0179 |
| 6 | 1,037 | 0,0056 | 3716,61 | 0,904 | 0,0140 | -1507,87 | 2208,74 | 0,0196 |
| 6,5 | 1,001 | 0,0061 | 3587,58 | 0,904 | 0,0152 | -1507,87 | 2079,71 | 0,0213 |
| 7 | 0,975 | 0,0065 | 3494,4 | 0,904 | 0,0163 | -1507,87 | 1986,53 | 0,0228 |
| 7,5 | 0,958 | 0,007 | 3433,47 | 0,907 | 0,0175 | -1512,88 | 1920,59 | 0,0245 |
| 8 | 951 | 0,0075 | 3408,38 | 0,91 | 0,0186 | -1517,88 | 1890,5 | 0,0261 |
| 8,5 | 0,949 | 0,0079 | 3401,22 | 0,918 | 0,0198 | -1531,22 | 1870 | 0,0277 |
| 9 | 0,96 | 0,0084 | 3440,64 | 0,942 | 0,0209 | -1571,26 | 1869,38 | 0,0293 |
| 9,5 | 0,972 | 0,0089 | 3483,65 | 0,932 | 0,0221 | -1554,58 | 1929,07 | 0,031 |
| 10 | 0,985 | 0,0093 | 3530,24 | 0,939 | 0,0233 | -1566,25 | 1963,99 | 0,0326 |
| 10,5 | 0,956 | 0,0098 | 3426,3 | 0,946 | 0,0245 | -1577,93 | 1848,37 | 0,0343 |
| 11 | 1,002 | 0,0102 | 3591,17 | 0,947 | 0,0256 | -1579,6 | 1830 | 0,0358 |
| 11,5 | 1,006 | 0,0107 | 3605,5 | 0,949 | 0,0268 | -1582,93 | 1822,4 | 0,0375 |
| 12 | 1,006 | 0,0112 | 3605,5 | 0,95 | 0,028 | -1584,6 | 1809,87 | 0,0392 |
| 12,5 | 1,006 | 0,0117 | 3605,5 | 0,918 | 0,0291 | -1531,22 | 1800 | 0,0408 |


Каждая функция характеризуется новой Н, частотой излома  и частотой среза
и частотой среза  . Кроме того, трапеция имеет определенный коэффициент наклона
. Кроме того, трапеция имеет определенный коэффициент наклона  . Все необходимые расчеты сведены в таблице.
. Все необходимые расчеты сведены в таблице.
Талица №4
Таблица для нахождения коэффициента наклона
| Трапеция | H | 
| 
| Х |
| 1 | 3584 | 1071 | 571 | 0,53 |
| 2 | -1668 | 429 | 0 | 0 |
По коэффициенту наклона трапеции для нее может быть найдена h-функция, т.е. функция времени.
При построении h-функций, соответствующих трапециям, ординаты табличных значений следует умножить на высоту соответствующей
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 24 |
| ПКТУ.КП 03.03 003 ПЗ |
данные расчетов приведены в таблице №3
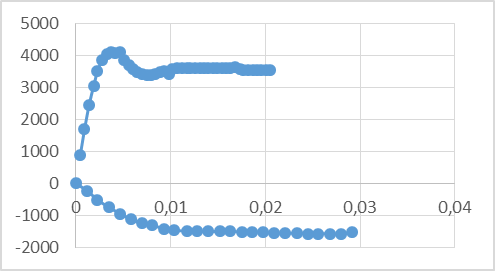
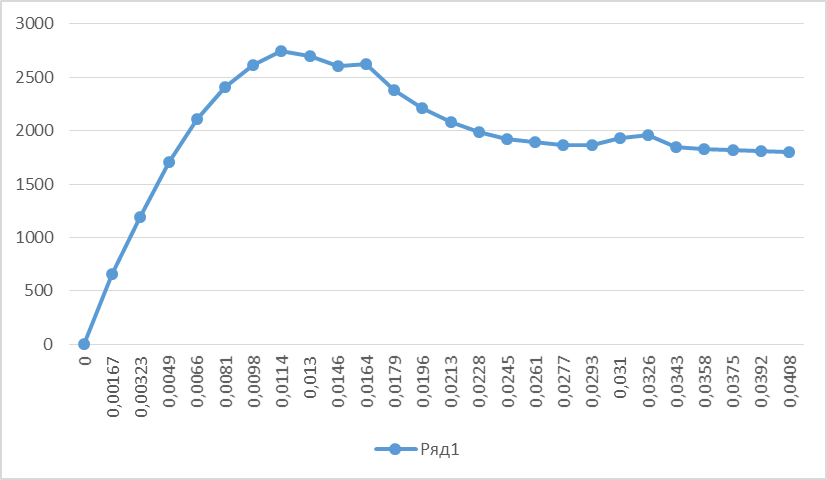
Рис. 9 График переходной характеристики системы автоматического управления (САУ)
Проанализировав построенные графики получаем искомую кривую переходного процесса. Эти построения выполнены на (Рис.9), а все необходимые расчеты занесены в таблице №3.