 2020-10-10
2020-10-10 436
436ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Филиал УГНТУ в г. Октябрьский
Кафедра механики и технологии машиностроения
Структурный анализ плоских механизмов
Учебно – методическое пособие к лабораторной работе
для студентов специальностей обучающихся по направлениям -131000 «Нефтегазовое дело» по профилю «Эксплуатация и обслуживание объектов добычи нефти» и 151000 «Технологические машины и оборудование» по профилю «Машины и оборудование нефтяных и газовых промыслов».
Уфа 2017
Учебно-методическое пособие предназначено для выполнения лабораторных работ по дисциплинам «Теоретическая и прикладная механика» и «Теория механизмов и машин», а также для освоения и закрепления теоретического материала по разделу «Структурный анализ механизмов». Содержит теоретические основы и методику выполнения лабораторной работы. Рекомендуется для студентов обучающихся по направлениям -131000 «Нефтегазовое дело» по профилю «Эксплуатация и обслуживание объектов добычи нефти» и 151000 «Технологические машины и оборудование» по профилю «Машины и оборудование нефтяных и газовых промыслов».
Составитель Абдюкова Р.Я., доц., канд. техн. наук
Рецензент Арсланов Т.Г.,проф., докт. техн. наук,
© Уфимский государственный нефтяной технический университет, 2017
ОГЛАВЛЕНИЕ
Введение……………………………………………………………………….
1.Лабораторная работа. Структурный анализ плоских механизмов ……….
2. Содержание и порядок проведения работы ………………………………
3.Теоретические сведения и основные понятия о структуре………………. механизмов…………………………………………………………………….
3.1.Структурная формула определения числа степеней свободы пространственных и плоских механизмов………………
3.2.Структурная формула плоских рычажных механизмов по Ассуру…………………………………………………………………………..
3.3.Кинематическая схема механизма………………………………………..
4. Пример выполнения лабораторной работы………………………………..
5. Вопросы, представленные к защите лабораторной работы……………….
Введение
Основной целю изучения раздела «Теория механизмов и машин» дисциплины «Теоретическая и прикладная механика» является освоение студентами общих методов исследования и проектирования механизмов и общих вопросов механики машины. Изучение темы «Структурный анализ плоских механизмов» формирует у студентов необходимую начальную базу знаний по общим методам анализа и синтеза механических систем, положенных в основу технологического оборудования, применяемого в сфере будущей профессиональной деятельности выпускника (буровое оборудование и оборудование нефтегазодобычи) и обеспечивает фундаментальную подготовку студента в области анализа работы механического оборудования.
При выполнении данной лабораторной работы у студентов должны:
-вырабатываться навыки по оценке надежности элементов конструкции;
-формируется общее представление о конструкциях и назначениях типовых деталей, часто встречающихся в технологических машинах и оборудовании, в частности, нефтегазодобывающей промышленности;
-развивается инженерное мышление с точки зрения изучения современных методов, правил, норм расчета и конструирования (проектирования) деталей и сборочных единиц машин общего назначения.
В результате изучения лабораторной работы «Структурный анализ плоских механизмов»
- студен должен знать основные понятия и терминологию, относящиеся к данной теме, типовые конструкции деталей и узлов машин, их свойства и области применения; основы автоматизации расчетов и конструирования деталей машин, элементы оптимизации проектирования, основные свойства и характеристики материалов - ОПК-1;
- студент должен уметь пользоваться справочниками и технической литературой, атласами конструкций, конструировать типовые узлы машин общего назначения на основании самостоятельно проведенных расчетов, моделировать процессы, оборудование и производственные объекты - ОК-7;
- студент должен владеть методами целенаправленного применения базовых знаний в области естественных наук в профессиональной деятельности
ОПК-1, ОПК-2
Лабораторная работа
Тема: Структурный анализ плоских механизмов
Цель работы: овладение навыками составления кинематических схем и выполнения структурного анализа плоских механизмов.
Оборудование, инструменты, принадлежности
1 Модели механизмов (по указанию преподавателя).
2 Чертежные принадлежности.
Содержание и порядок проведения работы
1 Составить кинематическую схему в соответствии с требованиями ГОСТ 2.770-68.
2 Составить таблицу характеристик кинематических пар, указать их обозначение, составляющие звенья, наименование, класс (табл.4).
3 Составить таблицу характеристик звеньев (табл. 5).
4 Выделить структурные группы, образующие механизм; указать их класс, порядок и вид (рис.15).
5 Построить план механизма для наиболее наглядного положения кривошипа (рис.16).
6 Определить степень подвижности сложного механизма W.
7 Составить формулу строения механизма.
Теоретические сведения и основные понятия о структуре механизмов
Теория механизмов и машин (ТММ) - наука, изучающая структуру (строение), кинематику и динамику механизмов. Ее основные проблемы- исследование существующих механизмов (анализ) и проектирование новых механизмов по заданным условиям (синтез).
В ТММ изучают механизмы, которые по своим структурно-конструктивным признакам делятся на семь следующих видов: рычажные, зубчатые, кулачковые, винтовые, фрикционные с гибкими связями, фрикционные с непосредственным контактом катков, прочие (в том числе смешанные).
Механизм - называется система твердых тел, предназначенная для передачи и преобразования движения одного или нескольких тел в требуемые движения других твердых тел. Из практики известно, что всякий механизм состоит из отдельных деталей и звеньев.
Деталью называют изделие, изготовленное без каких-либо сборочных операций, например: рычаг, ось, винт, гайка, зубчатое колесо. Каждая подвижная деталь или группа деталей, образующих одну жесткую систему тел, называется подвижным звеном механизма.
Звено – твердое тело или система жестко связанных тел, входящих в состав механизма. Подвижные звенья делятся на входные и выходные.
Входное звено (ведущее, начальное) - звено, которому сообщается заданное движение и соответствующие силовые факторы (координата которого принятая за обобщенную).
Выходное (ведомое) звено- то, на котором получают требуемые движение и силы.
Звенья механизмов делятся на простые и сложные. Если звено имеет больше двух элементов (кинематических пар), которыми оно присоединяется к другим звеньям механизма, его называют сложным, все остальные звенья считают простыми. Простые звенья изображают на схемах в виде линий, а сложные – в виде геометрических фигур. Геометрические фигуры, изображающие сложные звенья, заштриховывают. На рисунке 1 показаны чертежи и условные изображения простого и сложного звеньев.
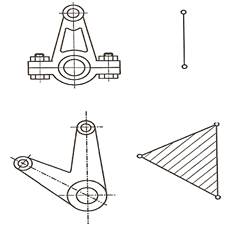
а)
б)
а - простое звено; б - сложное звено
Рисунок 1- Звенья механизмов и их изображения
Звенья механизмов также разделяются на подвижные и неподвижные. Неподвижное звено называют стойкой. За стойку принимают то звено, относительно которого изучают законы движения всех других звеньев. Например, в станках это станина, в редукторах – корпус, в автомобилях – шасси или кузов и т.п. Стойка в исследуемом механизме одна, а присоединений к стойке может быть сколько угодно. На рисунке 2 показана структурная схема компрессора.
Подвижные звенья могут совершать вращательное, поступательное и сложное движения. Подвижные звенья, в зависимости от вида их движения и назначения, имеют определенные названия (кривошип, шатун, коромысло, кулиса, ползун, камень, кулачок, зубчатые и фрикционные колеса, рейка и т.п.).
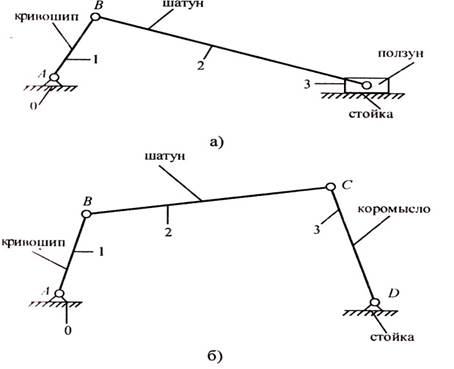
Рисунок 2-Кинематические схемы рычажных механизмов:
а) кривошипно-ползунный; б) кривошипно-коромысловый.
Кинематическая цепь - система звеньев, соединённых между собой кинематическими парами. Если звенья образуют один или несколько замкнутых контуров, цепь называется замкнутой (рис.3, б); если звенья кинематической цепи не образуют замкнутых контуров, то она называется незамкнутой (рис.3,а).
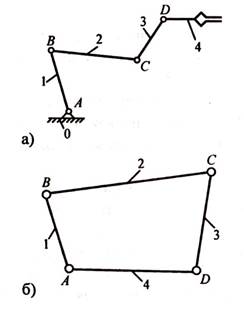
Рисунок 3 – Кинематические цепи: а) незамкнутая, б) замкнутая
Структурная схема – безмасштабное графическое изображение механизма с применением условных обозначений. На рисунке 4 показана структурная схема компрессора.
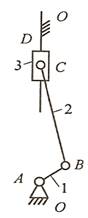
1 – кривошип; 2 – шатун; 3 – поршень; А, В, С, Д – кинематические пары (подшипники)
Рисунок 4 – Структурная схема кривошипно-ползунного механизма.
Кривошип – вращающееся звено механизма, которое совершает полный оборот вокруг оси, связанной со стойкой.
Шатун – звено механизма, образующее кинематические пары только с подвижными звеньями.
Коромысло – звено механизма, которое совершает только колебательные движения при неполном вращении вокруг неподвижной оси, связанной со стойкой.
Ползун – звено, образующее поступательную пару со стойкой.
Камень – звено, образующее поступательную пару с кулисой.
Кулиса – подвижное звено механизма, являющееся направляющей для камня.
Качающийся ползун – звено, образующее поступательную пару со штоком и вращательную пару со стойкой.
Шток – звено, входящее в поступательную пару с качающейся шайбой.
Кулачок - звено, имеющее рабочий профиль переменной кривизны.
Толкатель – звено, совершающее прямолинейное движение и образующее высшую пару с кулачком.
Зубчатое колесо – звено с замкнутой на нем системой выступов, обеспечивающее взаимодействие с соответствующими выступами другого колеса.
Фрикционное колесо – звено, которое осуществляет передачу движения за счет сил трения между прижимаемыми к нему телами.
Рейка – подвижное звено, у которого два размера значительно меньше третьего.
В таблице 1 приведены основные виды звеньев механизмов и их условные изображения.
Таблица 1- Основные виды звеньев
| Название | Условное обозначение | Движение | Особенности |
| Стойка | 
| Отсутствует | - |
| Стойка | 
| Отсутствует | - |
| Кривошип | 
| Вращательное | Полный оборот |
| Шатун | 
| Сложное | Нет пар, связанных со стойкой |
| Коромысло | 
| Качательное | Неполный оборот |
| Ползун | 
| Возвратно-поступательное | Направляющая неподвижна |
| 1.Кулиса 2.Камень | 
| Вращательное, колебательное | Направляющая подвижна |
| 1.Кулиса 2.Камень | 
| Сложное | Направляющая подвижна |
Продолжение таблицы 1
| Название | Условное обозначение | Движение | Особенности |
| 1.Кулиса 2.Камень |
| Возвратно-поступательное | Направляющая подвижна |
| 1.Шток 2.Качающийся ползун | 
| Колебательное, вращательное и поступательное. | Ползун вращается |
| 1.Кулачок 2.Толкатель | 
| Вращательное, колебательное. | Профиль определяет закон движения ведомого звена |
| 1.Кулачок 2.Толкатель | 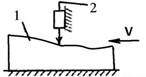
| Возвратно-поступательное | Профиль определяет закон движения ведомого звена |
| Зубчатое колесо | 
| Вращательное, качательное | Зубчатый контур |
| Фрикционное колесо | 
| Вращательное, качательное | |
| Рейка | 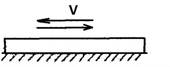
| Возвратно-поступательное | Может иметь зубчатый контур |
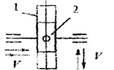
Кинематическая пара (КП) - подвижное соединение 2-х звеньев, допускающее их определенное относительное движение, т.е. идеальная удерживающая связь, между двумя подвижными звеньями. На рисунке 5 изображены кинематические пары, соответственно вращательная и поступательная. Они допускают вращение (а) или поступательное движение (б) одного звена относительного другого.
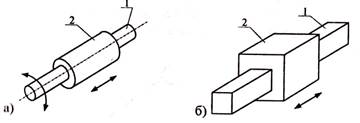
Рисунок 5– Вращательная (а) поступательная (б) кинематические пары
Кинематические пары обозначаются на схемах механизмов буквами латинского алфавита (А, В, С..). Совокупность поверхностей, линий или точек звена, которые будут контактировать с другим звеном, образуя кинематическую пару, называют элементом кинематической пары. В зависимости от вида контакта элементов кинематических пар, различают высшие и низшие кинематические пары. Кинематические пары, образованные элементами в виде линии или точки, называют высшими.
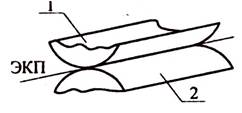
Рисунок 6 –Высшая кинематическая пара в виде двух цилиндров
Кинематические пары,образованные элементами в виде поверхностей, называют низшими. К низшим относятся вращательные и поступательны кинематические пары. На рисунке 7 показана вращательная кинематическая пара, в которой соприкосновенье звеньев происходит по цилиндрической поверхности. Пара допускает вращение одного звена относительно другого. Элементом кинематической пары является цилиндрическая поверхность. Условное изображение вращательной пары представлена на рисунке 8.

Рисунок 7 – Низшая кинематическая пара


Рисунок 8 –Условные изображения вращательной кинематической пары
Условное изображение поступательной кинематической пары представлена рисунке 9.
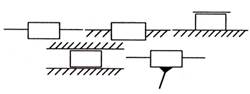
Рисунок 9 – Условные изображения поступательной кинематической пары
Кинематические пары подразделяются также по числу степеней свободы.
Степень свободы - возможное простейшее независимое движение, характеризуемое изменением одного параметра (линейной или угловой координаты). Число степеней свободы или подвижность механизма - число независимых обобщенных координат, однозначно определяющее положение всех его звеньев на плоскости или в пространстве. При работе механизма все его звенья (за исключением стойки), перемещаются в пространстве и в каждый момент времени занимают определенные положения. Чтобы определить положение какого-либо звена, надо знать координаты других звеньев, например углы поворота или линейные перемещения. Независимые координаты, определяющие положение всех звеньев механизма относительно стойки, называют обобщенными координатами механизма. Таким параметром может быть, например, угол φ1 кривошипа. Итак, если механизм имеет одну степень свободы, то определенному положению его начального звена (как правило, оно же является входным) соответствует одно определенное положение остальных звеньев. Поэтому степень подвижности механизма в большинстве случаев, численно равна числу входных звеньев механизма. Свободное тело в пространстве имеет 6 степеней свободы (рис.10).

Рисунок 10 – Возможные независимые перемещения свободного тела в пространстве
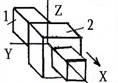
В кинематических парах, соединяющих звенья, наложены ограничения на относительное движение звеньев. Ограничение, отнимающее одну степень свободы, называется связью. В сумме число связей и число степеней свободы равно шести. На звено может быть наложено несколько различных связей или, иначе, звено может образовывать одно или несколько подвижных соединений с другими звеньями. На рисунке 11 изображены звенья с наложенными на них различными связями.
а) б)
а – соединения четырех звеньев; б – соединение двух звеньев; 0, 1, 2, 3 – звенья; А, В, С – связи Рисунок 11- Виды подвижных соединений звеньев
Класс кинематической пары определяется по числу связей. По числу степеней свободы в соответствии с предложение В.В. Добровольского все кинематические пары делятся на пять видов:
1. Однопарные пары:
а) вращательная пара (рисунок 12, а) – допускает одно относительное вращательное движение;
б) поступательная (рисунок 12, б) – допускает одно относительное поступательное движение;
в) винтовая пара (рисунок 12, в)- допускает одно относительное винтовое движение.
В одноподвижных парах наложено 5 связей.
2. Двуподвижные пары. Если на рисунке убрать с вала 1 два выступа, то получим двуподвижную пару. Эта цилиндрическая двуподвижная пара допускает два независимых движения: вращательное и поступательное, и на неё наложено четыре связи (рисунок 12,г).
3. Трёхподвижные пары. Это плоскостная пара (рисунок 13,а, б), сферический шарнир (рисунок,д). Трёхподвижные пары допускают три назависимых движения, и на них наложено три связи.
4. Четырёхподвижные пары. Допускают четыре независимых движения, и на них наложены две связи (рисунок 13,в).
5. Пятиподвижные пары. Допускают пять независимых движений, и на них наложена одна связь. Звенья соприкасаются в точке (рисунок 13,г). Одно-, двух-, трёхподвижные – это низшие кинематические пары. Четырёх и пятиподвижные – это высшие кинематические пары.
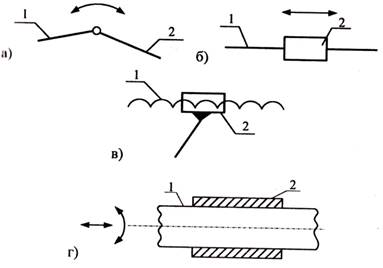
Рисунок 12 - Кинематические пары одноподвижные -: а) вращательная, б) поступательная, в) винтовая, двуподвижная кинематическая пара (г), в которой одно звено относительно другого может одновременно совершать вращательное и поступательное движения
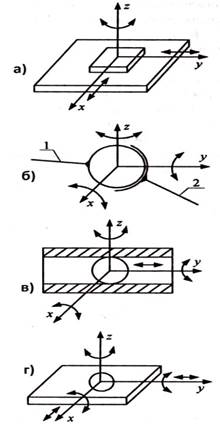
Рисунок 13– Кинематические пары: а) трёхподвижная кинематическая пара плоскостная, б) трёхподвижнавя сферическая кинематическая пара, в) четырёхподвижная кинематическая пара, г) пятиподвижная кинематическая пара
Класс кинематической пары определяется по числу связей. В таблице 2 приведены кинематические пары с 1-5 классы.
Таблица 2-Классификация кинематических пар
| Рисунок | Название кин.пары | Условное обозначение кин.пары | Подвижность пары | Число связей | Класс кин.пары |

| Вращательная Р5 | 
| 1 | 5 | 5 |
| Поступательная Р5 | 
| 1 | 5 | 5 |

| Винтовая Р5 | 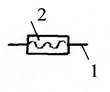
| 1 | 5 | 5 |
| Цилиндри-ческая Р4 | 
| 2 | 4 | 4 |

| Сферическая Р3 | 
| 3 | 3 | 3 |
Продолжение таблицы 2
| Шар-плоскость | 
| 5 | 1 | 1 |
Структурная формула определения числа степеней свободы пространственных и плоских механизмов
В плоском механизме траектории точек движущихся звеньев находятся в одной или параллельных плоскостях. Числом степеней свободы механизма называется число независимых координат, определяющих положение всех звеньев относительно стойки. Каждая из таких координат, называется обобщённой. Т.е. число степеней свободы механизма равно числу обобщённых координат.
Для определения числа степеней свободы пространственного механизма применяют структурную формулу Сомова-Малышева:
W=6n-5p5– 4p4-3p3– 2p2-р1, где
W- число степеней свободы механизма;
6- число степеней свободы отдельно взятого (свободного) тела в пространстве;
n-число подвижных звеньев;
р1, р2, р3, р4, р5- классы кинематических пар (рi), соответственно i= 1, 2, 3, 4, 5 –классы кинематических пар.
Если к пространственному механизму наложить три связи, то получим структурную формулу для плоских механизмов:
W = (6-3)n-(5-3)p5– (4-3)p4,
W = 3n-2p5– p4,
Полученная формула называется формулой Чебышева.
Примечание:
Если степень подвижности механизма W=1, то это соответствует одному ведущему звену. Если W >1, то следует назначить дополнительные ведущие звенья или указать «лишние» степени свободы. Если W<1, то в механизме есть пассивная связь или допущена ошибка при составлении кинематической схемы.








