 2020-10-12
2020-10-12 874
874Предмет теоретической механики. Этапы развития. Основные понятия тер.меха.
Механическое движение - это происходящий во времени процесс изменения положения одних тел относительно других (их взаимная неподвижность – относительный покой - рассматривается как частный случай).
Механическое взаимодействие – это явление, при котором одно тело порождает изменение механического состояния второго (изменяет его скорость, или форму – по причине появляющихся деформаций).
Теоретическая механика – это наука о наиболее общих законах механического движения и взаимодействия тел.
Периодов развития механики:
1. Донаучный;2. Элементарный;3. Период формирования современных понятий и формулировок законов;4. Период триумфального шествия теорий механического движения и преувеличения их значимости в вопросах познания окружающего мира 5. Период формирования теоретических основ различных прикладных вопросов механики 6. Современный период – характеризуется появлением мощного метода исследований с помощью компьютерной техники, позволившей существенно расширить классы решаемых практических задач.
Основные понятиятер.меха:
1. Матер.точка-это тело, размерами которого в условиях конкретной задачи можно принебреч.
2. Механическая система- любая совокупность матер. Точек.
3. Матер. Тело- механич. Система образов. Непрерывной совокупностью матер точек.
4. Твердое тело- метер. Тело расстояние между любыми точками которого остаеться неизменноыми.
5. Сила- векторная величина явл.мерой механич. Действия одного тела на другое.
6. Линия действия силы- прямая на которой направлена сила.
7. Система сил- любая совокупность сил действующих на механич. Систему.
8. Эквивалентные системы сил- системы сил под действием каждой из которых твердое тело будет находиться в одинаковом кинетич. Состоянии.
9. Уравновеш. Система сил- система сил которая будучи приложена к телу не меняет его кинетич. Состояние.
10. Силы действ. На механич. Систему деляться: внешние(силы действ. На матер.точки рассматриваемой системы со стороны матер. Точек не пренадлежащих рассматриваемой системе) и внутренние(силы взаимод. Между матер. Точками расматриваемой системы.)
11. Плечё- кратчайшее расстояние от указанной точки до линии действия силы.
Введение в статику. Предмет статики. Основные задачи статики. Основные понятия статики.
Предмет изучения и основные задачи статики
Статика – это часть теоретической механики, в которой вводят количественные характеристики механических действий (сила, момент, силовой винт и т.д.) и изучают связи между ними.
Основные учебные задачи статики – изучение законов и методов, с помощью которых можно: 1) определять действующие на тела неизвестные силы; 2) преобразовывать одни системы сил в другие.
Основные понятия статики: За материальную точку принимают такое тело, размеры которого малы по сравнению со смежными телами.
Абсолютно твердым телом в теоретической механике называют такое тело, расстояние между двумя любыми точками которого остается неизменным при любых силовых воздействиях, то есть тело не
деформируется.
Силой называется физическая величина, появляющаяся при взаимодействии тел или физических полей и определяется по появлению деформаций или ускорений.
Совокупность сил, действующих на какое-либо тело, называется системой сил.
Проекция силы на ось. Момент силы относительно точки и оси.
Понятие о проекции силы на ось- есть алгебраич. Величина равная произведению модуля вектора силы на cos угла между этим вектором и полож. Направлен.оси.
F
о а х
F1x
F1x=f1cosальфа
Момент силы относительно точки и оси
Момент силы относительно точки О - это вектор, модуль которого равен произведению модуля силы на плечо - кратчайшее расстояние от точки О до линии действия силы. Направление вектора момента силы перпендикулярно плоскости, проходящей через точку и линию действия силы, так, что глядя по направлению вектора момента, вращение, совершаемое силой вокруг точки О, происходит по часовой стрелке.
M(F)=Fq*h=F*cos альфа*h
Аксиомы статики.
Аксиома I (об абсолютно твердом теле). Две силы, приложенные к свободному абсолютно твердому телу, взаимно уравновешиваются тогда и только тогда, когда они равны по модулю (F1=F2) и направлены вдоль общей линии действия в противоположные стороны (рис. 18):
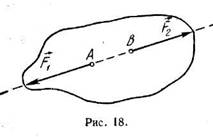
Эта аксиома справедлива только для абсолютно твердого тела. Она определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома II. (О присоединении и отбрасывании уравновешивающихся сил). Действие данной системы сил на тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Аксиома III (аксиома параллелограмма сил). Равнодействующая двух сил у приложенных к твердому телу в одной точке и направленных под углом друг к другу, приложена в той же точке и изображается по величине и направлению диагональю параллелограмма, построенного на данных силах как на двух сторонах
Вектор  , равный диагонали параллелограмма, построенного на векторах
, равный диагонали параллелограмма, построенного на векторах  1и 2 (рис. 20), называется геометрической суммой векторов 1и 2:
1и 2 (рис. 20), называется геометрической суммой векторов 1и 2:
= 1+ 2
Аксиома IV. Силы, возникающие при действии двух тел друг на друга, всегда равнымежду собой по модулю и действуют по одной прямой в противоположные стороны (III закон Ньютона или закон равенства действия и противодействия).
Аксиома V (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело отвердеет (станет абсолютно твердым).
Связи и их реакции. Принцип освобождаемости от связей.
Принцип освобождаемости от связей: с точки зрения установления правильных математических зависимостей между силами, любое несвободное тело можно рассматривать как свободное - отделённое от связей, но к которому приложены их реакции,
Связи и их реакции
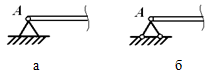 Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б
Рисунок 1.3
Шарнирно-подвижная опора (рисунок 1.4, а)
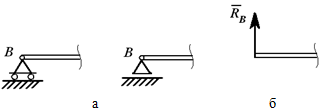
Рисунок 1.4
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и MD момента.
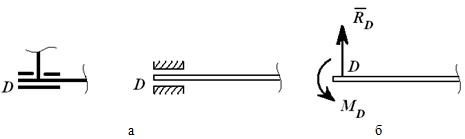
Рисунок 1.6
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
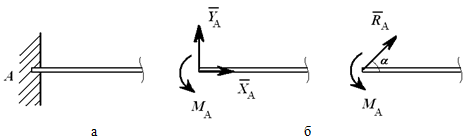
Рисунок 1.8








