2014-02-02
2014-02-02 553
553ЛЕКЦИЯ №7
Способы регулирования угловой скорости ротора исполнительного асинхронного микродвигателя, или способы управления, вытекают из теории о форме вращающегося магнитного поля. Изменяя напряжение управления Uу и углы β и γ раздельно или одновременно, воздействуют на форму магнитного поля статора и тем самым на угловую скорость ротора.
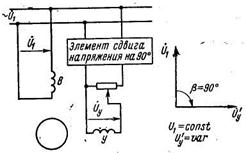
Амплитудное управление (рис. 2.9). Обмотку возбуждения В подключают к сети переменного тока с номинальным напряжением U1. Ha обмотку управления У подают сигнал – напряжение управления Uy, сдвинутое по фазе относительно напряжения возбуждения U1 на угол 90°. Управление угловой скоростью ротора осуществляют изменением амплитуды напряжения управления при неизменной его фазе.
При равенстве приведенных напряжений управления и возбуждения (Uy'=U1) эффективный коэффициент сигнала
αе = kтрα = 1, (2.11)
а поле статора в двигателе круговое (α = Uy/U1 – коэффициент сигнала при амплитудном управлении).
С изменением напряжения управления эффективный коэффициент сигнала становится отличным от единицы, а поле – эллиптическим. При αе = 0, т. е. снятом сигнале управления, поле статора становится пульсирующим.
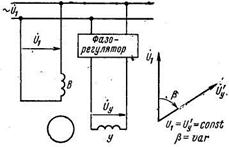
Фазовое управление (рис. 2.10). Обмотку возбуждения В подключают к сети переменного тока с номинальным напряжением U1. Ha обмотку управления У подают номинальное напряжение, переменное по фазе относительно напряжения возбуждения. Номинальным называют такое напряжение управления, которое соответствует равенству UУ' = U1. Управление угловой скоростью ротора осуществляют изменением фазы напряжения управления (угла β). За коэффициент сигнала принимают sin β. При sin β = 1 вращающееся магнитное поле статора круговое; при l > sin β > 0 – эллиптическое, при sin β = 0 – пульсирующее.