 2014-02-04
2014-02-04 1418
1418При определении абсолютной, относительной погрешности и точности измерений вместо истинного значения физической величины реально может быть использовано её действительное значение.
Список литературы
Примеры программ
Половинное деление
int Find(int *array, int size)
{
int a = 0,b = size-1,t;
do
{
t = (b+a)/2;
if (m[t] == x)return t;
if (m[t]>x) b = t;
else a = t;
}while (b-a>1);
if (m[a] == x) return a;
if (m[b] == x) return b;
return -1;
}
Сортировка пузырьком
int t;
char flag;
do
{
flag = 0;
for(int i=0;i<N-1-i;i++)
if (m[i]>m[i+1]) {t=m[i];m[i]=m[i+1];m[i+1]=t;flag=1;}
}while(flag)
Обход дерева
struct Node
{
Node *parent,*left,*right;
};
void Action(Node *node)
{
if (node == NULL) return;
//action;
Action(node->left);
Action(node->right);
}
void Action2(Node *node)
{
queue<Node*> q;
q.push(node);
do
{
node = q.front();
q.pop();
//action
if (node->left!=NULL) q.push(node->left);
if (node->right!=NULL) q.push(node->right);
}
while(!q.empty)
}
- Иванова Г.С. Технология программирования: Учебник для вузов. – М.: МГТУ им. Н.Э.Баумана, 2002.
- Подбельский В.В. Язык С++: Учебн. пособие. – М.: Финансы и статистика, 1995.
- Г. Майерс. Надёжность программного обеспечения. 1976 // Перев. на русский язык под ред. И.А.Махован и др. – М.: Мир, 1980.
- В. В. Шураков. Надежность программного обеспечения систем обработки данных: учеб. для вузов. Изд. 2-е, пеpеpаб. и доп. — М.: Финансы и статистика, 1987.— 272 с
- Электронная энциклопедия ru.wikipedia.org
[1] https://ru.wikipedia.org/wiki/C
[2] Квадратные скобки не являются частью записи формата, а указывают на необязательность аргумента
В метрологии применяются показатели точности функционирования приборов, т. е. показатели, характеризующие потери информации при преобразовании сигнала от объекта всеми функциональными устройствами прибора. Показателями точности функционирования прибора являются:
- погрешность прибора – разность между действительными и расчётными (идеальными) значениями информативного параметра выходного сигнала прибора, соответствующими информативному параметру входного сигнала;
- погрешность функционирования прибора – разность между действительным и расчётным изменениями информативного сигнала прибора, соответствующими изменению информативного параметра входного сигнала;
- погрешность воспроизводимости прибора – разность действительных значений информативного параметра выходного сигнала прибора, соответствующих одному и тому же информативному параметру входного сигнала при повторных циклах функционирования.
Такими же показателями характеризуется и точность работы функциональных устройств прибора. Например, показателями точности работы механизмов являются погрешности положения ведомого звена, перемещения и погрешности от мёртвого хода – основная причина погрешности воспроизводимости механизмов.
Основными показателями точности, как приборов, так и функциональных устройств является погрешность функционирования, которая в соответствии с ГОСТом нормируется характеристиками систематической и случайной её составляющих, либо характеристиками её суммарной погрешности.
1.2. Связь точности с надежностью и стабильностью
Одной из метрологических характеристик является метрологическая надёжность средств измерений. Её связывают не с явными отказами этих средств (потерей работоспособности, наличием явных механических поломок, повреждений и т. д.), а с так называемыми скрытыми отказами, под которыми понимают выход погрешности меры или прибора за пределы оговоренного для неё допуска при сохранении общей работоспособности средств измерений. Под метрологической надёжностью средства измерения понимают период времени, в течении которого гарантируется соблюдение основных метрологических характеристик данного средства измерения.
Важность этой характеристики становится понятной, если учесть, что другие метрологические характеристики (и в частности, точность) должны быть присущи прибору (мере) не только сразу после выпуска с завода или после регулировки, но и на протяжении определённого срока. Эту характеристику устанавливают, пользуясь специальными (вероятностными) методами теоретического расчёта и методами экспериментальной оценки. При этом обычно говорят о той или иной вероятности сохранения метрологических характеристик (и в частности, точности) в течение заданного времени.
Вероятность безотказной работы P (τ) средств измерений является экспоненциальной функцией времени τ работы: P (τ) = e-∫λ(τ) d τ, (4)
где: λ(τ) – интенсивность (параметр) потока отказов, определяемая отношением частоты отказов к вероятности безотказной работы.
Для увеличения надёжности средств измерений применяются блочно-модульный принцип построения, используют облегчённый режим работы отдельных элементов и узлов, применяют резервирование элементов и целых измерительных устройств.
1.3. Причины и виды ошибок функционирования приборов
Погрешности, возникающие при изготовлении и эксплуатации прибора, в существенной мере влияют на большинство его показателей назначения, а также на показатели надёжности и технологичности. Рассмотрим подробнее погрешности, влияющие на показатели точности функционирования. Погрешность функционирования прибора обусловлена потерями информации ещё до поступления на чувствительный элемент прибора, в приборе и при регистрации результатов.
Доприборные или методические погрешности обусловлены ошибочностью или недостаточностью разработки принятой теории метода функционирования, либо допущениями в отношении объекта, сигнала или канала прохождения сигнала. Методические погрешности характерны для приборов, принцип действия которых основан на косвенных методах измерений.
Приборные или инструментальные погрешности обусловлены потерями информации в преобразователях сигнала из-за допущений в заложенной функции преобразования, погрешностей изготовления и сборки элементов, влияния эксплуатационных погрешностей и факторов.
Допущения в функции преобразования сигнала (теоретические погрешности) бывают трёх видов:
1. использование вместо строгой теоретической функции, связывающей информативные параметры выходного и входного сигналов, приближённой функции (например, замена тангенсной зависимости линейной зависимостью;
2. округление параметров, входящих в функцию преобразования, производимые из-за наличия иррациональных чисел, либо требований ГОСТа (округление до ближайших значений из нормального ряда);
3. конструктивные допущения, характерные для реальных конструкций.
Погрешности изготовления и сборки элементов являются технологическими и представляют собой отклонения от расчётных значений характеристик материалов, погрешности размеров, формы и расположения деталей. Технологические погрешности – одни из самых многочисленных и наиболее сильно влияющих на точность функционирования прибора первичных погрешностей. Эксплуатационные погрешности представляют собой погрешности размеров, форм и положения деталей, а также изменения характеристик материалов, влияния нагрузок, вибраций, сил трения, перепада температуры, давления, влажности, радиационного излучения и т. п.
Погрешности регистрации обусловлены потерями информации при регистрации результатов функционирования прибора. Эти погрешности связаны, как правило, с оператором и вызваны запаздыванием или опережением регистрации сигнала, погрешностями считывания результата, управления, настройки и выверки прибора, обработки результата.
Погрешности регистрации условно выделены в отдельную группу и связаны не только с объективными параметрами и характеристиками прибора, но и с субъективными психофизиологическими возможностями оператора. Так как погрешности считывания зависят от конструктивных параметров прибора, то их часто относят к эксплуатационным инструментальным погрешностям. Погрешности обработки результатов, особенно в случае, когда прибор выдаёт их в неявном виде, относят к методическим погрешностям. Погрешности настройки и выверки могут быть отнесены к тем и другим.
Перечисленные погрешности будем называть первичными погрешностями и факторами. Они представляют собой отклонения от номинальных значений конструктивных параметров деталей и сборочных единиц, изменения влияющих факторов (Δ q′), отклонения от расчётных значений функции преобразования сигнала в приборе (Δ f) и отклонение информативного параметра сигнала, поступающего на вход прибора, от его номинального значения (Δ x):
Δ q = q – q0, Δ q′ = q′ – q′0 , Δ f = f – f0, Δ x = x – x0, (5)
где: q, q′, x – действительные значения конструктивных параметров, влияющих факторов и информативного параметра входного сигнала соответственно; q0, q′0, x0 – номинальные значения конструктивных параметров, влияющих факторов и информативного параметра входного сигнала соответственно; f, f0 – действительная и номинальная функции, связывающие информативные параметры y и x выходного и входного сигналов соответственно.
Заметим, что первичные факторы приводят к изменению конструктивных параметров и сборочных единиц, т. е. оказывают влияние на качество прибора посредством Δ q, причём один первичный фактор (например, изменение температуры) может действовать на изменение как одного, так и нескольких конструктивных параметров одновременно.
2. Общие сведения о погрешностях и способах их нормирования
2.1. Классификация погрешностей
В 1.1 было показано, что в процессе измерения получают некоторую оценку значения физической величины в принятых единицах, а истинное значение физической величины всегда остается неизвестным, из-за чего нельзя определить истинное значение погрешности измерения. Для приближенной оценки погрешности используют понятие действительного значения физической величины, которое находят более точными методами и средствами. Получаемую оценку погрешности, представляющую собой разность  между полученным при измерении и действительным значениями физической величины (здесь и далее имеется в виду абсолютная погрешность), в зависимости от причин возникновения, характера и условий проявления принято выражать суммой двух составляющих, называемых случайной
между полученным при измерении и действительным значениями физической величины (здесь и далее имеется в виду абсолютная погрешность), в зависимости от причин возникновения, характера и условий проявления принято выражать суммой двух составляющих, называемых случайной  и систематической
и систематической  погрешностями измерений:
погрешностями измерений:
 . (6)
. (6)
Классификация погрешностей измерений приведена на рис.1.
Рис. 1. Классификация погрешностей измерений
Случайная погрешность измерения - составляющая погрешности измерения, изменяющаяся случайным образом при повторных измерениях одной и той же величины. Случайная погрешность определяется факторами, проявляющимися нерегулярно с изменяющейся интенсивностью. Значение и знак случайной погрешности определить невозможно, так как в каждом опыте причины, вызывающие погрешность, действуют неодинаково.
Случайная погрешность не может быть исключена из результата измерений. Однако проведением ряда повторных измерений и использованием для их обработки методов математической статистики определяют значение измеряемой величины со случайной погрешностью, меньшей, чем для одного измерения.
При организации статистических измерений, для которых и определяется случайная погрешность, создаются условия, характеризующиеся тем, что интенсивность всех действующих факторов доводится до некоторого уровня, обеспечивающего более или менее равное влияние на формирование погрешности. В этом случае говорят об ожидаемой погрешности (рис. 1). Кроме этой погрешности могут иметь место грубые погрешности и промахи.
Грубой погрешностью называют погрешность измерения, существенно превышающую ожидаемую при данных условиях. Причинами грубых погрешностей могут являться неисправность средств измерений, резкое изменение условий измерений и влияющих величин.
Промах - погрешность измерения, которая явно и резко искажает результат. Промах является случайной субъективной ошибкой. Его появление - следствие неправильных действий экспериментатора. Грубые погрешности и промахи обычно исключаются из экспериментальных данных, подлежащих обработке.
Отдельное значение случайной погрешности предсказать невозможно. Совокупность же случайных погрешностей какого-то измерения одной и той же величины подчиняется определенным закономерностям, которые являются вероятностными. Они описываются в метрологии с помощью методов теории вероятностей и математической статистики. При этом физическую величину, результат измерения которой содержит случайную погрешность, и саму случайную погрешность рассматривают как случайную величину.
Для количественной оценки объективной возможности появления того или иного значения случайной величины служит понятие вероятности, которую выражают в долях единицы (вероятность достоверного события равна 1, а вероятность невозможного события - 0).
Математическое описание случайных непрерывных величин осуществляется обычно с помощью дифференциальных законов распределения случайной величины. Эти законы определяют связь между возможными значениями случайной величины (погрешности) и соответствующими им плотностями вероятностей (непрерывной считают случайную величину, имеющую бесчисленное множество значений, получить которое можно только при бесконечном числе измерений).
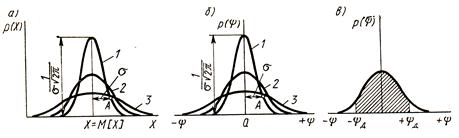
Рис. 2. Кривые нормального распределения случайных величин и их случайных погрешностей
Наиболее распространенным при измерениях является нормальный закон распределения. Для некоторой измеряемой величины Х кривая 1 распределения плотности вероятности p(Х) для нормального закона распределения имеет вид, показанный на рис.2, а. При этом плотность вероятности (или плотность распределения) характеризует плотность, с которой распределяются значения случайной погрешности в данной точке. Плотность вероятности для закона нормального распределения описывается уравнением:
 , (7)
, (7)
где: М[Х] и  характеристики нормального распределения.
характеристики нормального распределения.
Кривую 1 (рис. 2, а) можно рассматривать как кривую 1 распределения случайной погрешности (рис. 2, б), перенеся начало координат в точку Х = М[Х]. В этом случае плотность вероятности:
 , (8)
, (8)
где: = Х – М[Х] - случайная погрешность.
Характеристики М[Х] и называют соответственно математическим ожиданием и среднеквадратическим отклонением. Они являются важными числовыми характеристиками случайной величины.
Математическое ожидание является тем значением величины, вокруг которого группируются результаты отдельных наблюдений (см. рис. 2), а среднеквадратическое отклонение характеризует рассеяние результатов отдельных наблюдений относительно математического ожидания, т. е. форму кривой распределения плотности вероятности, площадь под которой всегда равна единице. На рисунке показаны кривые закона нормального распределения (кривые Гаусса) случайной величины Х (рис. 2, а) и ее случайной погрешности (рис. 2, б) при различных значениях среднеквадратического отклонения; рассеяние для кривой 3, больше, чем рассеяние для кривой 2; а рассеяние для кривой 2 больше, чем кривой 1.
Геометрически определяется как расстояние от оси симметрии нормального распределения до точки А перегиба кривой распределения (рис. 2, а, б).
Чтобы определить вероятность Р попадания результата измерения или случайной погрешности в некоторый наперед заданный интервал от - до + (рис. 2, в), необходимо найти площадь под кривой распределения, ограниченную вертикалями на границе интервала. Для нормального распределения:
до + (рис. 2, в), необходимо найти площадь под кривой распределения, ограниченную вертикалями на границе интервала. Для нормального распределения:
 . (9)
. (9)
Решить интеграл (9) аналитически невозможно. Обычно он приводится в виде таблиц, позволяющих определить его значение приближенно в долях единицы. Чаще решается обратная задача, состоящая в определении доверительного интервала.
Доверительным интервалом с границами (или доверительными границами от - до + , рис. 2, в) называют интервал, который с заданной вероятностью Pд, называемой доверительной, накрывает истинное значение измеряемой величины.
Наиболее часто применяемым в практике обработки результатом измерений для нормального закона распределения является значение доверительной вероятности для значений доверительного интервала, равных  и
и  . Значения доверительных вероятностей для них соответственно равны 0,500; 0,950; 0,997. Физически это означает, что появление случайных погрешностей за пределами интервала
. Значения доверительных вероятностей для них соответственно равны 0,500; 0,950; 0,997. Физически это означает, что появление случайных погрешностей за пределами интервала  равновероятно, т. е. составляет 50 % вероятности появления случайных погрешностей, меньших по значениям
равновероятно, т. е. составляет 50 % вероятности появления случайных погрешностей, меньших по значениям  и 50 % - больших . При интервалах, равных
и 50 % - больших . При интервалах, равных  и
и  , вероятность появления случайных погрешностей, больших
, вероятность появления случайных погрешностей, больших  и , составляет соответственно 5 и 0,3 %.
и , составляет соответственно 5 и 0,3 %.
Часто встречающимся в измерительной практике законом распределения случайной погрешности является равномерный закон (рис. 3, а), когда случайная непрерывная величина имеет возможные значения в пределах некоторого конечного интервала, причем в пределах этого интервала все значения случайной величины обладают одной и той же плотностью вероятности:



 (10)
(10)

Примером равномерного распределения погрешности может служить погрешность от трения в приборах с механическими подвижными элементами.
Графическая интерпретация закона распределения, называемого двухмодальным, показана на рис. 3, б. В соответствии с этим законом малые случайные погрешности встречаются реже, чем большие. Середина кривой распределения плотности вероятности оказывается прогнутой вниз.
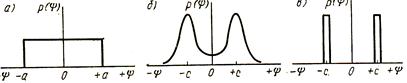
Рис. 3. Виды дифференциальных законов распределения случайной погрешности
В пределе двухмодальное распределение может превратиться в распределение, показанное на рис. 3, в, когда единственно наблюдаемыми погрешностями будут погрешности  . Такое распределение называют дискретным. Двухмодальное распределение обычно представляют как композицию дискретного и нормального распределений со среднеквадратическим отклонением
. Такое распределение называют дискретным. Двухмодальное распределение обычно представляют как композицию дискретного и нормального распределений со среднеквадратическим отклонением  , и аналитически описывается выражением:
, и аналитически описывается выражением:
 . (11)
. (11)
Появление двухмодального распределения обычно вызвано явлениями люфта и гистерезиса в кинематических цепях средств измерений.
Систематическая погрешность - составляющая погрешности измерения, остающаяся постоянной или закономерно изменяющаяся при повторных измерениях одной и той же величины (см. рис. 1). Выявление и оценка систематических погрешностей являются наиболее трудным моментом любого измерения и часто связаны с необходимостью проведения исследований. Обнаруженная и оцененная систематическая погрешность исключается из результата введением поправки. В зависимости от причины возникновения различают следующие систематические погрешности.
Погрешность метода (теоретическая погрешность) измерений - составляющая погрешности измерения, обусловленная несовершенством метода измерений. Здесь необходимо учитывать тот факт, что метод измерения, по определению, включает в себя и принцип измерения. Рассматриваемая погрешность определяется в основном несовершенством принципа измерения и, в частности, недостаточной изученностью явления, положенного в основу измерения.
Инструментальная погрешность измерения - составляющая погрешность измерения, зависящая от погрешности применяемых средств измерений. Данная погрешность имеет несколько составляющих, наиболее важные из которых определяются несовершенством конструкции (или схемы), технологии изготовления средств измерений, постепенным их износом и старением материалов, из которых эти средства измерений изготовлены.
Погрешность установки является следствием неправильности установки средств измерений.
Погрешность от влияющих величин является следствием воздействия на объект и средством измерений внешних факторов (тепловых и воздушных потоков, магнитных, электрических, гравитационных и других полей, атмосферного давления, влажности воздуха, ионизирующего излучения).
Субъективная погрешность обусловлена индивидуальными свойствами человека, выполняющего измерения. Причиной ее являются укоренившиеся неправильные навыки выполнения измерений. К этой систематической погрешности относятся, например, погрешность из-за неправильного отсчитывания десятых долей деления шкалы прибора, погрешности из-за различной для различных людей скорости реакции и т. п.
По характеру проявления систематические погрешности подразделяют на постоянные и переменные (см. рис. 1).
Постоянные погрешности не изменяют своего значения при повторных измерениях. Причинами этих погрешностей являются: неправильная градуировка или юстировка средств измерений, неправильная установка начала отсчета и т. д.
Переменные погрешности при повторных измерениях могут принимать различные значения. Если переменная погрешность при повторных измерениях возрастает или убывает, то ее называют прогрессивной. Переменная погрешность может изменяться при повторных измерениях периодически или по сложному закону. Причинами возникновения переменной систематической погрешности являются: действие внешних факторов и особенности конструкций средств измерений.
Погрешности, приведенные на рис. 1, могут иметь место, как при статических, так и при динамических измерениях. Погрешности, возникающие при этих измерениях, принято называть соответственно статическими или динамическими.

