 2014-02-02
2014-02-02 1693
1693Алгоритмы планирования запросов к жесткому диску
Планирование запросов
При использовании не блокирующегося системного вызова может оказаться, что требуемое устройство уже занято выполнением некоторых операций. В этом случае не блокирующийся вызов может немедленно вернуться, не выполнив запрошенных команд. При организации запроса на совершение операций ввода-вывода с помощью блокирующегося или асинхронного вызова занятость устройства приводит к необходимости постановки запроса в очередь к данному устройству. В результате с каждым устройством оказывается связан список неудовлетворенных запросов процессов, находящихся в состоянии «ожидания», и запросов, выполняющихся в асинхронном режиме. Состояние «ожидание» расщепляется на набор очередей процессов, дожидающихся различных устройств ввода-вывода (или ожидающих изменения состояний различных объектов – семафоров, очередей сообщений, условных переменных в мониторах и т.д.).
После завершения выполнения текущего запроса операционная система (по ходу обработки возникшего прерывания) должна решить, какой из запросов в списке должен быть удовлетворен следующим, и инициировать его исполнение. Точно так же, как для выбора очередного процесса на исполнение из списка готовых нам приходилось осуществлять краткосрочное планирование процессов, здесь нам необходимо осуществлять планирование использования устройств, пользуясь каким-либо алгоритмом этого планирования. Критерии и цели такого планирования мало отличаются от критериев и целей планирования процессов.
Задача планирования использования устройства обычно возлагается на базовую подсистему ввода-вывода, однако для некоторых устройств лучшие алгоритмы планирования могут быть тесно связаны с деталями их внутреннего функционирования. В таких случаях операция планирования переносится внутрь драйвера соответствующего устройства, так как эти детали скрыты от базовой подсистемы. Для этого в интерфейс драйвера добавляется еще одна специальная функция, которая осуществляет выбор очередного запроса, - функция strategy.
Рассмотрим алгоритмы планирования, связанные с удовлетворением запросов, на примере жесткого диска.
Современный жесткий магнитный диск представляет собой набор круглых пластин, находящихся на одной оси, и покрытых с одной или двух сторон специальным магнитным слоем (рис.13.2). Около каждой рабочей поверхности каждой пластины расположены магнитные головки для чтения и записи информации. Эти головки присоединены к специальному рычагу, который может перемещать весь блок головок над поверхностями пластин как единое целое. Поверхности пластин разделены на концентрические кольца, внутри которых собственно и может храниться информация. Набор концентрических колец на всех пластинах для одного положения головок (т.е. все кольца равноудаленные от оси) образует цилиндр. Каждое кольцо внутри цилиндра получило название дорожки (по 1-й или 2-е дорожки на каждую пластину). Все дорожки делятся на равное число секторов. Количество дорожек, цилиндров и секторов может варьироваться от одного жесткого диска к другому в достаточно широких пределах. Как правило, сектор является минимальным объемом информации, которое может быть прочитано с диска за один раз.
При работе диска набор пластин вращается вокруг своей оси с высокой скоростью, подставляя по очереди под головки соответствующих дорожек все их сектора. Номер сектора, номер дорожки и номер цилиндра однозначно определяют положение данных на жестком диске и, наряду с типом совершаемой операции – чтение или запись, полностью характеризуют часть запроса, связанную с устройством, при обмене информацией в объеме одного сектора.
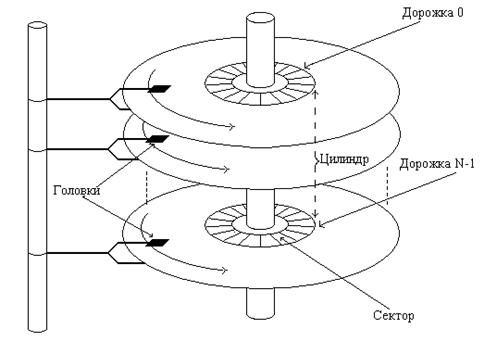
Рисунок 13.2 - Схема жесткого диска








