 2014-02-02
2014-02-02 1377
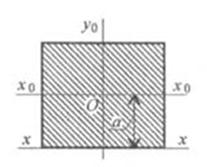
1377Експериментально чисте зрушення може бути здійснене при крученні тонкостінної труби (рис.а), тому деформація чистого зрушення віднесена до теми " кручіння".
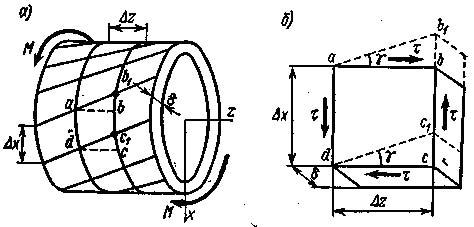
Розглянемо елемент abсd, вирізаний з тонкостінної труби (рис.б).
При виникненні дотичної напруги елемент перекошується. Якщо вважати грань ad закріпленою, то грань bc зрушиться в положення b1c1. Прямі кути між гранями змінюються на величину γ. Кут γ, є зміною спочатку прямого кута між гранями елементарного паралелепіпеда, називається кутом здвигу.
Дотична напруга τ і кут γ зрушення, що називається також відносним зрушенням, пов'язані прямою пропорціональністю, т. е. законом Гуку
τ = Gγ
Величина G, що входить в цю формулу, називається модулем зсуву.
Ця величина характеризує жорсткість матеріалу при деформації зрушення.
Оскільки виражається абстрактним числом, то модуль зрушення G, як і модуль подовжньої пружності Е, має ту ж одиницю виміру, що і напруга: МПа, Н/мм2, кгс/см2.
Між модулем пружності Е і модулем зрушення G існує залежність, яку приводимо без виведення:
де - μ коефіцієнт поперечної деформації(коефіцієнт Пуассона).
Приведені співвідношення між G і E підтверджуються дослідами.
С/Р 3. Характер роботи болтових і зварювальних з’єднань, розрахунок
на міцність цих з’єднань.
У будівництві використовують такі основні види з'єднань:
за допомогою зварювання, болтові, на заклепках.
Широке застосування зварних з'єднань (близько 95 % усіх з'єднань) забезпечують такі їхні переваги:
− висока міцність та надійність;
− відсутність проміжних деталей та отворів (що спрощує конструкцію);
− простота виконання;
− економія металу на 10-20% порівняно з болтовими та заклепковими з'єднаннями (через відсутність ослаблень та проміжних деталей);
− високий рівень механізації та автоматизації процесів зварювання.
Водночас зварні з'єднання мають певні недоліки:
− залишкові деформації та напруження внаслідок нерівномірного нагрівання та вистигання металу;
− значні концентрації напружень поблизу та безпосередньо у швах, що зумовлює зниження міцності при повторних і вібраційних навантаженнях;
− у навколошовній зоні термічно та механічно зміцнені метали відпускаються;
− для виконання зварного з'єднання потрібне спеціальне обладнання.
У будівництві найбільше використовують електродугове зварювання. За рівнем механізації та автоматизації процесів розрізняють такі його види:
- ручне,
- напівавтоматичне (автоматизована подача зварювальних матеріалів і ручне переміщення дуги вздовж шва)
- автоматизоване зварювання (всі операції автоматизовано).
За способом заповнення шва металом та технологічними ознаками розрізняють:
− зварювання електродом, що плавиться;
− зварювання неплавким електродом (вугільним чи вольфрамовим із введенням у дугу присадкового стержня для отримання необхідного об'єму рідкого металу і заповнення шва).
З'єднання за допомогою заклепок використовують у металевих конструкціях з 20-х років XIX ст.
Болтові з'єднання з'явилися практично одночасно з чавунними конструкціями (близько середини XVIII ст.). Багаторічна практика використання таких з'єднань свідчить про їхню високу надійність.
Болти широко використовують під час монтажу конструкцій, що зумовлено простотою їх встановлення. Вони не потребують спеціалізованого обладнання. Відсутність термічної дії дає змогу уникнути залишкових напружень та деформацій. Отвори під болти чи заклепки є відносно невеликими концентраторами напружень. Цим забезпечується необхідна надійність конструкцій при несприятливому характері навантажень. Тому при інтенсивних динамічних, вібраційних та повторних навантаженнях доцільно використовувати заклепкові й болтові з'єднання.
Розрахунок на міцність зварювальних з’єднань
Основним критерієм працездатності швiв зварних з’єднань є міцність.
Умова міцності зварного шва: τ = F/ Lh ≤ [τ зр]
де [τ зр] - напруга, що допускається, на зріз для зварного шва
F- розтягуюча сила;
L - довжина шва валика
h - розрахункова висота шва
С/ Р 4. Моменти інерції: статичні, полярні, осьові, відцентровий момент інерції
Статичний момент плоскої фігури відносно осі х або у дорівнює добутку усієї площі фігури на відстань від її центру ваги до цієї осі.
Розглянемо переріз у довільній прямокутній системі координат хOу. Виберемо елемент площі. Тоді величина буде називатися статичним моментом площі A відносно осі х:
Аналогічно — статичний момент цієї площі відносно осі y:
Розмірність статичних моментів площі — одиниці довжини в третьому степені (м3, см3). Статичні моменти площі можуть бути додатними, від'ємними та рівними нулю.
Осьовий момент інерції відносно розглянутої осі — сума добутків елементарних площ dA на квадрат їх відстаней до цієї осі, взята по всій площі перерізу A.
Полярний момент інерції відносно даної точки — сума добутків елементарних площ dA на квадрати їх відстаней До цієї точки, взята по всій площі перерізу A:

Відцентровий момент інерції відносно осей координат — сума добутків елементарних площ dA на їх відстані до цих осей, взята по всій площі перерізу A:
Відцентровий момент інерції мають розмірність м4 і може бути додатнім, від'ємним і рівним нулю. Осі, відносно яких відцентровий момент інерції дорівнює нулю, називаються головними центральними осями.
5. Момент інерції відносно паралельних осей
Осі, що проходять через центр тяжіння фігури, називаються центральними. Момент інерції відносно центральної осі називається центральним моментом інерції.
Осі Охо і Ох паралельні. При паралельному перенесенні прямокутної системи осей уоОхо в нове положення уоОх значення моментів інерції JX, Jy, Jxy заданого перерізу міняються.
Теорема. Момент інерції відносно якої-небудь осі дорівнює центральному моменту інерції відносно осі, паралельної даної, плюс твір площі фігури на квадрат відстані між осями.
Jx = Jxo + Aa2,
де Jx - момент інерції відносно осі Ох;
Jxo - момент інерції відносно осі Охо;
А - площа перерізу;
а - відстань між осями Ох і Oxо.
6. Головні осі і головні центральні моменти.
Головні осі інерції - це осі, відносно яких осьові моменти інерції набувають екстремальних значень: мінімальний же максимальний.
Якщо головна вісь проходить через центр тяжіння фігури, то вона має назву – головна центральна вісь, а момент інерції відносно цієї осі – головним моментом інерції, отже головні центральні моменти інерції розраховуються відносно головних осей, що проходять через центр тяжіння.
Особливо важливим є то, що якщо фігура має вісь симетрії, то ця вісь з а в ж д и буде однією з головних центральних осей.
Питання для самоперевірки:
План лекції
1. Що таке зріз, і його умова міцності.
2. Що таке зімяття, і його умова міцності.
3. Поняття про чистий зсув.
4. Болтові і зварювальні з’єднаня
5. Розрахунок на міцність цих з’єднань.
6. Назвіть які моменти інерції ви знаєте
7.Поняття моменту інерції відносно паралельних осей
8.Теорема моменту інерції відносно паралельних осей
9. Головні осі і головні центральні моменти.
.
Питання для самостійного вивчення:
С/Р 1. Характер роботи болтових і зварювальних з’єднань, розрахунок на
міцність цих з’єднань.
С/Р 2. Моменти інерції.
Література:
1. Михайлов А.М. Сопротивление материалов. М.: Стройиздат, 1989.
с.155-169
ЛЕКЦІЯ № 10
Тема 2.3. Прямий вигин
План лекції
1. Прямий вигин
2. Диференціальні залежності при згині
3. Правило знаків
4. Загальний хід визначення зусиль і побудови епюр
5. Правила контролю правильності епюр Q і M (Qy і Mx)
6. Рішення задач на визначення та побудови епюр внутрішніх силових факторів при згині.
1. Прямий вигин
Вигин - вид деформації, при якому відбувається викривлення осей прямих брусів (балок) або зміна кривизни осей кривих брусів.
Брус, що працює на вигин, називається балкою.
Вигин пов'язаний з виникненням в поперечних перерізах бруса згинальних моментів.
Прямий вигин виникає у разі, коли згинальний момент в даному поперечному перерізі бруса діє в площині, що проходить через одну з головних центральних осей інерції цього перерізу.
У випадку, коли площина дії згинального моменту в даному поперечному перерізі бруса не проходить ні через одну з головних осей інерції цього перерізу, називається косим.
Прямий згин – це вид опору, коли зовнішні сили прикладені перпендикулярно осі бруса (балки).
При прямому згині виникає два види внутрішніх зусилля:
поперечна сила і згинальний момент.
Якщо момент є єдиним внутрішнім силовим фактором, то вигин називається чистим. При наявності поперечної сили вигин буде поперечним.
Якщо при прямому або косому вигині в поперечному перерізі бруса діє тільки згинальний момент, то відповідно є чистий прямий або чистий косою вигин.
Якщо в поперечному перетин діє також і поперечна сила, то є поперечний прямий або поперечний косой вигин.
2. Диференціальні залежності при згині
q = – dQy / dz Qy = dMx / dz
З цих рівнянь випливає
q = - d2Mx / dz2
Тут вісь z спрямована уздовж центральної осі балки.
3. Правило знаків
Правило знаків для поперечної сили
Поперечна сила вважається позитивною, якщо вона прагне повернути елемент балки по ходу годинникової стрілки.
При побудові епюри поперечної сили позитивні значення поперечної сили відкладаються вгору від горизонтальної базової лінії, а негативні - вниз.

Правило знаків для згинальних моментів
Згинальний момент приймається позитивним, якщо зовнішнє навантаження, прикладена до розглянутої відсіченої частини, згинає елемент балки так, що нижні волокна виявляються розтягнутими, тобто вісь балки викривляється опуклістю вниз.
Потрібно врахувати, що при побудові епюри згинального моменту прийнято відкладати позитивний момент вниз (з боку розтягнутого волокна).

Зусилля в балці визначають методом перерізів.
4. Загальний хід визначення зусиль і побудови епюр
1. Визначаємо опорні реакції
2. Намічаємо характерні перетину балки.
3. Визначаємо поперечну силу і згинальний момент в кожному характерному перерізі.
4. За знайденим значенням поперечної сили і згинальних моментів будуємо епюри.
5. Правила контролю правильності епюр Q і M (Qy і Mx)
Епюра Qy є прямолінійною на всіх ділянках.
Епюра М (Мх) є криволінійною (квадратна парабола) на ділянці під рівномірно розподіленим нагрузкой1, і прямолінійна на всіх інших ділянках.
Під точкою докладання зосередженої сили (реакції) на епюрі Qy обов'язково повинен бути стрибок (розрив) на величину цієї сили (реакції).
Аналогічно, під точкою докладання зосередженого моменту на епюрі Mx обов'язково буде стрибок на величину моменту.
Якщо на ділянці під розподіленим навантаженням епюра Qy перетинає вісь, то епюра М в цьому перерізі має екстремум.
На ділянках з поперечною силою одного знака епюра моментів Mx має однакову монотонність. Так, якщо Qy> 0 епюра моментів убивает зліва направо, при Qy> 0 епюра Mx зростає зліва направо.
Порядок лінії на епюрі Qy завжди на одиницю менше, ніж на епюрі згинальних моментів. Тобто,
- якщо епюра моментів Mx - квадратна парабола, то епюра поперечних сил Qy на цій ділянці - похила пряма,
- якщо епюра Mx - похила пряма, то епюра Qy на цій ділянці - пряма, паралельна осі,
- якщо постійна М (пряма, паралельна осі), то на цій ділянці Qy = 0.
Питання для самоперевірки:
1. Що таке вигин?
2. Що таке прямий вигин?
3. Що називається косим?
4. Поняття чистий прямий або чистий косий вигин.
5. Поняття поперечний прямий або поперечний косий вигин.
6. Диференціальні залежності при згині
7. Правило знаків для згинальних моментів
8. визначення зусиль і побудови епюр
9. Правила контролю правильності епюр Q і M.
Питання для самостійного вивчення:
С/Р 1. Самостійне рішення задач на визначення та побудови епюр
внутрішніх силових факторів при згині.
Література:
1. Михайлов А.М. Сопротивление материалов. М.: Стройиздат, 1989.
с.180-261
Модуль 3 Статика споруд
ЛЕКЦІЯ № 12
Тема 3.1. Основні положення. Задачі і методи статики споруд
Тема 3.2. Дослідження геометричної незмінності плоских
стрижневих систем
План лекції
1.Основні поняття. Гіпотези та припущення.
2.Поняття розрахункової схеми.
С/Р 3.Класифікація споруд. Опорні пристрої. Види навантажень.
4.Геометрично змінні і незмінні системи.
5.Ступінь свободи і ступінь незмінності системи.
С/Р 6.Необхідна умова геометричної незмінності системи.
С/Р 8.Миттєво змінні системи.
1.Основні поняття. Гіпотези та припущення.
Домовимося спорудою {системою) називати сукупність твердих тіл
(елементів), нерухомо з'єднаних між собою. До будь-якого спорудження пред'являються такі найголовніші вимоги:
1. Нерухомість щодо заснування та незмінюваність доданої геометричної форми протягом всього терміну служби.
2. Міцність, жорсткість, стійкість. Міцність і стійкість гарантують безпеку експлуатації споруди, а достатня жорсткість обмежує деформацію його в таких межах, які не перешкоджають нормальним умовам експлуатації.
3. Економічність. Економічність споруд визначається найменшими витратами коштів на матеріали і зведення споруди.
Щоб задовольнити цим вимогам, треба вміти розраховувати споруду. Наука, що вивчає розрахунок споруд на міцність, жорсткість і стійкість незалежно від методу розрахунку, властивостей матеріалу (пружні і непружні) і діючої навантаження ЯКІ НАВАНТАЖЕННЯ ВИ ЗНАЄТЕ????? (Тимчасової або постійної, суцільний або зосередженої, статичної або динамічної) називається будівельної механікою.
Наука, що вивчає розрахунок споруд на міцність, жорсткість і стійкість незалежно від методу розрахунку, властивостей матеріалу та діючої навантаження називається будівельної механікою.
Статикою спору д називається розділ будівельної
механіки, що вивчає методи розрахунку споруд на міцність, жорсткість і стійкість при статичній дії навантаження
Між статикою споруд, теоретичної механікою опором матеріалів існує тісний взаємозв'язок. Опір матеріалів базується на знанні теоретичної механіки і вивчає методи розрахунку окремих елементів споруд на міцність, жорсткість і стійкість.
Статика споруд застосовує - методи теоретичної механіки та опору матеріалів до статичного розрахунку споруд і служить базою для вивчення наступних інженерно-будівельних дисциплін.
Давайте пригадаємо з розділу теор. механіки основні поняття і аксіоми!!!!!
Основними завданнями статики споруд є наступні
1. Встановлення законів освіти найвигідніших форм
споруд, тобто таких форм, які задовольняють вищевикладеним найголовнішим вимогам, що пред'являються до споруд.
ЯКІ ВИМОГИ???? Міцність, жорсткість, стійкість, економічність.
2. Визначення внутрішніх сил в різних перетинах елементів споруд і виконання розрахунків по підбору і перевірці їх розмірів.
3. Вивчення пружних переміщень, що виникають у споруді під впливом зовнішніх впливі.
4. Дослідження стійкості споруд.
Необхідно відзначити, що статика споруд - наука прикладна, вона вивчає сучасні методи розрахунку споруд і сприяє більш економного витрачання матеріалів і фінансових ресурсів країни.
Основні допущення
Основні припущення, що вводяться в статику споруд для розрахунку пружних систем, ті ж, що і в опорі матеріалів, з тією лише різницею, що вони належать не до окремого елементу, а до всього спорудження в цілому.
1.В відомих межах навантаження матеріал споруди володіє досконалою пружністю, м. тобто після припинення дії навантаження деформація повністю зникає.
2. Переміщення точок споруди, обумовлені його пружними деформаціями, дуже малі в порівнянні з розмірами самої споруди.
3. Переміщення точок упругодеформіруемого споруди у відомих межах навантаження прямо пропорційні силам, що викликають ці переміщення.
4. Справедливий принцип незалежності дії сил: результат дії на спорудження групи сил не залежить від послідовності навантаження ними споруди і дорівнює сумі результатів дії кожної з сил в окремо.
2.Поняття розрахункової схеми.
Розрахункова схема споруд - спрощене зображення дійсного споруди.
Вибір розрахункової схеми є відповідальне завдання. Розрахункова схема повинна дозволяти зробити розрахунок споруди максимально простим і в той же час повинна забезпечити розрахунку достатню достовірність і точність.
4.Геометрично змінні і незмінні системи.
Геометрично незмінні системи (споруди) - це системи які задовольняють слід. вимогу споруда повинна зберігати додану йому геометричну форму протягом всього терміну служби.
Геометрично незмінною називається система, не змінює додану їй геометричну форму ні за яких змінах положення її в просторі.
Змінна система -яка здатна змінювати свою геометричну форму без деформації матеріалу за рахунок кінцевих переміщень її елементів як твердих тіл.
5.Ступінь свободи і ступінь незмінності системи.
Ступені свободи - це сукупність незалежних координат переміщення і / або обертання, повністю визначає рух і / або положення тіла або системи тіл.
Наприклад
Тверде тіло, що рухається в тривимірному просторі, максимально може мати шість ступенів свободи: три поступальних і три обертальних.
• Автомобіль, якщо його розглядати як тверде тіло, переміщається по площині, а точніше кажучи, за деякою двовимірної поверхні (в двовимірному просторі). Він має три ступені свободи (одну обертальну, і дві поступальні).
• Поїзд змушений переміщатися по рейковому шляху, і тому він має тільки одну ступінь свободи.
Свобода системи - це її можливість здійснювати будь-які рухи щодо землі без деформації матеріалу.
Питання для самоперевірки:
1. Що вивчає статика споруд?
2. Гіпотези та припущення статики споруд
3. Поняття розрахункової схеми.
4. Класифікація споруд.
5. Назвіть опорні пристрої.
6. Які види навантажень?
7. Що таке геометрично змінні і незмінні системи?
8. Що називають ступіню свободи і ступіню незмінності системи?
Питання для самостійного вивчення:
1. Класифікація споруд. Опорні пристрої. Види навантажень.
2. Миттєво змінні системи.
3. Необхідна умова геометричної незмінності системи.
Література:
1. Мухин Н.В., Першин А.Н., Шишман Б.А. «Статика сооружений», - М. «Высшая школа», 1980 с.5-40, с.114-145
2. Сетков В.И. Сборник задач для расчетно-графических работ по технической механике. М.: 1989 с.
ЛЕКЦІЯ № 13
Тема 3.3. Статично визначувані плоскі ферми
План лекції
1. Статично визначувані плоскі ферми
2. Визначення зусиль у стержнях ферми аналітичним способом
С/Р 3. Поняття про статично визначені та статично невизначені системи.
1 Статично визначувані плоскі ферми
Рамні системи мають широке застосування в залізобетонних і
металевих конструкціях. Рідше вони застосовуються в дерев'яних конструкціях,
Встановивши статичну визначність рами, підтверджуємо, що виконано і необхідна умова її геометричної незмінюваності ЯКЕ??????
Не змінювати надану їй геометричну форму ні за яких змінах
однак щоб остаточно переконатися в незмінності рами, треба провести її структурний аналіз РОЗРАХУНОК - ВИЗНАЧИТИ ЗУСИЛЛЯ У КОЖНОМУ окремі елементи конструкції.
На прикладі ферми, ми навчимося визначати зусилля в кожному окремому елементі і конструкції в цілому і доведемо, що наша конструкція задовольняє всім вимогам, тобто міцною, стійкою, ЖОРСТКОЮ, економічною!
Згадаймо!!!
Умова рівноваги: 
Проекції сил на осі:
Визначення кутів:
Синус кута х - це відношення протилежного катета до гіпотенузи: sinx = а/с
Косинус кута х -це відношення прилеглого катета до гіпотенузи сosx= в/с
Тангенс кута х - це відношення протилежного катета до прилеглому: tgx = а/в
Котангенс кута х - це відношення прилеглого катета до протилежного:
ctgx = в/а
Порядок обчислення такий:
1. На схемі ферми всі вузли позначають буквами, а всі стрижні - цифрами.
2. По черзі вирізують всі вузли ферми і викреслюють їх силові схеми, позначаючи стрілками зусилля в перерізаних стержнях і зовнішні сили, прикладені до даного вузла. Зусилля зображують напрямками від вузла, тобто вважають, що всі стержні розтягнуті.
3. У центр кожного вузла поміщають початок осей координат, складають рівняння рівноваги для сходяться у вузлі сил і знаходять невідомі зусилля. Якщо при обчисленні зусилля вийде з негативним знаком, значить воно спрямоване в протилежну сторону, тобто не від вузла, а до вузла і, отже, відповідний
стрижень не розтягнутий, а стиснут. Якщо дорівнює «0» - значить стрижень не працює.
Порядок вирізання вузлів повинен бути таким, щоб у кожен послідовно розглянутий вузол входили тільки два стержня, зусилля в яких невідомі.
Так, переходячи від вузла до вузла, знайдемо зусилля в усіх стержнях ферми.
2. Визначення зусиль у стержнях ферми аналітичним способом
Аналітичний спосіб рішення:
2. Накреслити задану схему. Позначити стрижні - цифрами– цифрами
1,2,3, вузли –буквами А,Б,В.
По черзі викреслювати кожен вузол!
3. Вибрати об’єкт рівноваги - першу точку А, в якій максимум
відомих сил. До об’єкту додати всі відомі сили, які зійшлись в т.А
замініті зв'язку зусиллями S1, позначаючи стрілкамі від точки (припускаючи, що стрижень розтягнутий)
4. Вибрати осі координат. Зручну задати так, щоб вісь проходила
перпендикулярно лінії дії хоча б одній з невідомих сил, тобто невідомих має бути не більше двух.
5. Спроектувати всі сили та реакції на вибрані осі – скласти рівняння рівноваги з умови 
6. З рівнянь визначаємо невідомі необхідні ЗУСИЛЛЯ.
(Якщо S= 0, то стержень не працює; S= (-), стержень стислий, реакція спрямована до вузла; S= (+), стержень розтянут, реакція спрямована від вузла,)
Порядок вирізання вузлів повинен бути таким, щоб у кожен послідовно розглянутий вузол входили тільки два стержня, зусилля в яких невідомі.
Так, переходячи від вузла до вузла, знайдемо зусилля в усіх стержнях ферми.
Приклад № 3 Визначити зусилля в стержнях 1,2,3,4 ферми
Аналітичний спосіб рішення:
Викреслюємо задану схему(обов’язково в прийнятому масштабі). Позначаємо стержні цифрами, вузли буквами. На схемі вказуємо всі відомі значення – розміри висоти, довжини, значення сил
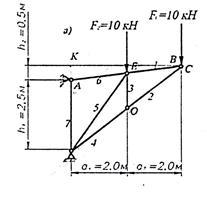
1. Визначення зусиль в стержнях ферми виконуємо поступовим
вирізуванням вузлів. Розглядаємо вузли як систему збіжних сил, використовуючи рівняння рівноваги. Першим треба взяти вузол, в якому збіжними є мінімум два стержня.
Для визначення зусиль в стержнях 1 і 2 вирізаємо вузол С.
2. Викреслюємо розрахункову схему для першого вузла (рис 2):
a. Вибираємо об’єкт рівноваги - вузол С.
b. до об’єкту додати всі відомі сили, які зійшлись в т. С, вказуємо на схемі кути.
c. від об’єкту подумки відкинути зв’язки і замінити їх реакціями R1 і R2 (реакція позначається як номер стержня)
Вибираємо осі координат.








