 2014-02-02
2014-02-02 791
791Экспериментально и теоретически доказано, что основной вклад в инерционность МУ вносит обмотка управления. Переходные процессы в рабочих обмотках протекают примерно один период питающего напряжения сети. Поэтому длительностью переходного процесса в обмотке Wр можно пренебречь и рассматривать переходной процесс только в Wупр. Для нее справедливо следующее дифференциальное уравнение:
 (7.7)
(7.7) 
где изменение магнитной индукции
 (7.8)
(7.8)
 (7.9)
(7.9)
Известно также
 (7.10)
(7.10)
 (7.11)
(7.11)
Подставим (7.9), (7.10), (7.11) в (7.8), а затем в (7.7)
 (7.12)
(7.12)
где  - КПД МУ
- КПД МУ
Умножив уравнение (7.12) на  получим:
получим:
 (7.13)
(7.13)
Решение дифференциального уравнения (7.13) имеет вид:
Тогда передаточная функция МУ имеет вид инерционного звена первого порядка:
В случае наличии нескольких обмоток, охватывающих оба сердечника сразу ( ,
, ), эквивалентная постоянная времени МУ будет равна сумме постоянных времени всех этих обмоток. Поэтому применяют меры по его снижению постоянной времени каждой из таких обмоток, в частности в обмотке реверсивного МУ вводятся балластные сопротивления.
), эквивалентная постоянная времени МУ будет равна сумме постоянных времени всех этих обмоток. Поэтому применяют меры по его снижению постоянной времени каждой из таких обмоток, в частности в обмотке реверсивного МУ вводятся балластные сопротивления.
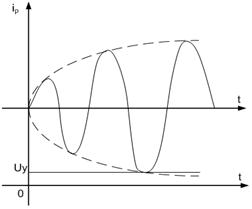
Рис.7.16
Основными способами снижающим габариты и постоянную времени Т являются повышение частоты рабочей обмотки Wр и переход к многокаскадному МУ при том же значении  .
.








