 2014-02-02
2014-02-02 1270
1270Для технической реализации типовой одноконтурной системы автоматического регулирования необходимо построить замкнутый контур регулирования с устройствами оперативного управления, позволяющему персоналу вмешиваться в работу системы.
Регулятор непрямого действия, построенный на средствах промышленного назначения, состоит из набора различных блоков и устройств, каждое из которых реализует определенные функциональные операции.
Для реализации функций автоматического регулирования необходимо получить сигнал, несущий информацию о регулируемой величине  , преобразовать его в соответствии с алгоритмом (законом) регулирования в управляющий сигнал
, преобразовать его в соответствии с алгоритмом (законом) регулирования в управляющий сигнал  и, наконец, осуществить преобразование последнего в регулирующее воздействие
и, наконец, осуществить преобразование последнего в регулирующее воздействие  .
.
Выделим в регуляторе средства получения информации (измерительная часть системы автоматического регулирования), средства преобразования информации в управляющий сигнал (блоки и устройства управляющей части системы регулирования) и средства преобразования управляющего сигнала в регулирующее воздействие (устройства исполнительной части системы регулирования). Возможность участия человека – оператора в управлении работой системы автоматического регулирования обеспечивается средствами оперативного управления (пульт управления с приборами по различным параметрам).
Измерительная часть системы (И.Ч.)
К ней относятся первичные и вторичные измерительные преобразователи. Первичные измерительные преобразователи (И.У.) являются датчиками измерения регулируемой величины, которые осуществляют преобразование регулируемого параметра объекта в изменение электрического сигнала на выходе  , являющегося носителем информации о . (например, преобразование температуры в термо-ЭДС, давления, уровня жидкости – в сигналы напряжения, в и т.п.). Они выпускаются промышленностью и их всегда можно подобрать по необходимому диапазону изменения параметров.
, являющегося носителем информации о . (например, преобразование температуры в термо-ЭДС, давления, уровня жидкости – в сигналы напряжения, в и т.п.). Они выпускаются промышленностью и их всегда можно подобрать по необходимому диапазону изменения параметров.
Вторичные измерительные преобразователи служат для согласования выхода датчика со входом управляющей части системы автоматического регулирования. Преобразователи выполняют операции по изменению энергетических потенциалов сигнала с датчиков (например, усилители, делители, нормирующие преобразователи); по изменению вида сигнала – носителя (например, электрического в пневматический, пневматического в электрический и т.п.); по преобразованию кода сигнала (например, аналогового в цифровой).
Вторичный измерительный преобразователь не является обязательным устройством измерительной части, он может отсутствовать, если измерительная и управляющая части системы регулирования реализованы на средствах ГСП и имеют одинаковый вид сигнала – носителя информации.
Управляющая часть системы регулирования состоит из одного или нескольких блоков, реализующих выбранный закон регулирования. Для реализации типовых законов регулирования промышленностью выпускаются блоки, осуществляющие простейшие линейные операции статического и динамического преобразования информации (усиление, алгебраическое суммирование, интегрирование и дифференцирование сигналов).
В более сложных случаях необходима также реализация нелинейных и логических операций. Если блоки, в которых все операции управляющей части по выработке закона регулирования размещены в одном корпусе, то эти блоки называют регулирующим прибором.
В состав исполнительной части типовой системы автоматического регулирования входят исполнительный механизм (ИМ) и согласующие устройства (усилители мощности, пускатели различного исполнения и др.)
Средства оперативного управления относятся к высшему уровню иерархии управления, решающему задачи оптимизации заданного значения  , диагностики и резервирования работы автоматической системы регулирования. С этой целью простейшие системы регулирования оснащаются приборами – индикаторами, показывающие заданное значение регулируемого параметра , его текущее значение , положение регулирующего органа
, диагностики и резервирования работы автоматической системы регулирования. С этой целью простейшие системы регулирования оснащаются приборами – индикаторами, показывающие заданное значение регулируемого параметра , его текущее значение , положение регулирующего органа  , а также задающими устройствами для изменения значения , переключателями режимов работы (“автоматическое регулирование – ручное управление”) и кнопками (ключами) управления исполнительным механизмом в режиме “ручное управление”. Переключатели режимов работы и кнопки управления часто совмещены конструктивно в одном устройстве, которое называется блоком ручного (или дистанционного) управления.
, а также задающими устройствами для изменения значения , переключателями режимов работы (“автоматическое регулирование – ручное управление”) и кнопками (ключами) управления исполнительным механизмом в режиме “ручное управление”. Переключатели режимов работы и кнопки управления часто совмещены конструктивно в одном устройстве, которое называется блоком ручного (или дистанционного) управления.
Электрические средства автоматического регулирования широко используются в энергетике, металлургии, химии и других отраслях промышленности. Их основными достоинствами (по сравнению с пневматическими и гидравлическими средствами) являются простота энергоснабжения, возможность преобразования регулируемых величин различной физической природы в электрический сигнал и передачи на значительные расстояния, возможность формирования разных законов регулирования с широким изменением параметров настройки, удобство централизации управления, возможность построения сложных систем в том числе многоуровневых систем управления с использованием цифровых вычислительных машин и др.
За время выпуска от первых универсальных электрических регуляторов произошли значительные изменения в элементной базе, конструктивном исполнении, функциональном составе, технических характеристиках и сигналах связи. Эти изменения отразились в смене нескольких поколений средств автоматизации.
Первое поколение средств автоматизации характеризуется применением электронных ламп для усиления и преобразования сигналов и использования индивидуальных измерительных преобразователей с естественными (неунифицированными) сигналами связи.
Второе поколение отличается применением полупроводниковых элементов и переходом к блочно-модульному принципу конструирования приборов с унификацией корпусов отдельных блоков и преимущественным использованием унифицированных сигналов связи (главным образом токового сигнала 0-5мА). Ко второму поколению можно отнести аппаратуру серии Р25, РП-2, РП-4, и комплекс блоков под общим названием “Каскад”.
Третье поколение характеризуется использованием в качестве основной элементной базы интегральных микросхем. К этому поколению относятся агрегатный комплекс электрических средств регулирования (АКЭСР) и другие.
Четвертое поколение характеризуется использованием микропроцессорной техники для создания цифровых систем управления любой сложности. К этому поколению относятся цифровые системы управления, выполнение на базе регулируемого микропроцессорного контроллера “Ремиконт”, “Протар”, “Минитерм” и многие другие, которые в последние годы интенсивно разрабатываются и внедряются различными фирмами.
Рассмотрим структуру типовой автоматической системы регулирования на примере второго поколения средств автоматизации с выделением дополнительных устройств и средств оперативного управления
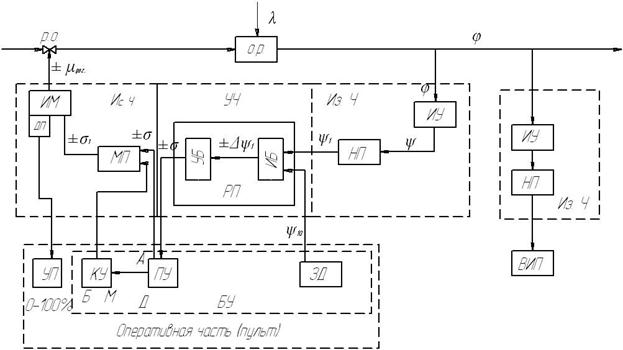
Рис. 8.5 Техническая структура типовой автоматической системы регулирования.Из.Ч – измерительная часть регулятора; УЧ – управляющая часть; Ис.Ч – исполнительные устройства; ИУ – первичный преобразователь (датчик); НП – нормирующий (вторичный) преобразователь; РП – регулирующий прибор; ИБ – измерительный блок; УБ – управляющий блок (усилитель); МП – магнитный пускатель (усилитель мощности); ИМ – исполнительный механизм; ЗД – задающее устройство; ПУ – переключатель управления (автоматическое –“А” или дистанционное –“Д”); КУ – ключ (кнопки) ручного управления (“Б” – в сторону “больше” – открыть; “М” – в сторону “меньше” – прикрыть); ДП – датчик перемещения; УП – указатель положения регулирующего органа; ВИП – вторичный измерительный прибор; БУ – блок управления.
В измерительной части регулятора регулируемый параметр измеряется датчиком (И.У.) и получаемый на выходе сигнал поступает на вторичный преобразователь (нормирующий преобразователь – НП). На выходе НП получают нормированный (унифицированный) сигнал  токовый (0÷5 мА; 4÷20 мА) или по напряжению. Заданное значение регулируемого параметра
токовый (0÷5 мА; 4÷20 мА) или по напряжению. Заданное значение регулируемого параметра  может быть изменено оператором вручную с помощью задающего устройства (ЗД). Нормированные сигналы от датчика и задающего устройства поступают в измерительный блок (ИБ) регулирующего прибора (РП). Регулирующий прибор состоит из двух блоков – измерительного (ИБ) и управляющего (УБ). На выходе измерительного блока формируется сигнал рассогласования
может быть изменено оператором вручную с помощью задающего устройства (ЗД). Нормированные сигналы от датчика и задающего устройства поступают в измерительный блок (ИБ) регулирующего прибора (РП). Регулирующий прибор состоит из двух блоков – измерительного (ИБ) и управляющего (УБ). На выходе измерительного блока формируется сигнал рассогласования  , который поступает в управляющий блок (УБ) на усиление и выработку управляющего сигнала
, который поступает в управляющий блок (УБ) на усиление и выработку управляющего сигнала  , который поступает на управление магнитным пускателем (МП) (магнитным усилителем типа УМД или тиристорным бесконтактным реверсивным преобразователем типа ПБР) через переключатель управления (ПУ).
, который поступает на управление магнитным пускателем (МП) (магнитным усилителем типа УМД или тиристорным бесконтактным реверсивным преобразователем типа ПБР) через переключатель управления (ПУ).
Переключатель управления (ПУ) дает возможность подключить цепи автоматического управления (А) работой пускателя (МП) или цепи ручного дистанционного управления (Д). При дистанционном управлении оператор может в ручную с помощью ключа управления (КУ) включать реверсивный пускатель (МП) таким образом, чтобы исполнительный механизм работал в сторону открытия регулирующего органа (“Больше”) или закрытия (“Меньше”) переключатель управления (ПУ), ключ управления (КУ) и задатчик (ЗД) могут использоваться как отдельными устройствами, так и располагаться в одном малогабаритном корпусе (блоке). Тогда этот блок называют блоком управления (БУ), в котором в качестве ключа управления используются кнопки.
Задача магнитного пускателя (контактного или бесконтактного) (МП), состоит в изменении порядка подключения фаз электропитания двигателя исполнительного механизма (ИМ) с целью включения его работы в сторону открытия или закрытия регулирующего органа согласно сигналы управления  .
.
В каждом исполнительном механизме расположен датчик перемещения регулирующего органа (ДП), действие которого связано с углом вращения выходного вала исполнительного механизма, то есть с перемещением регулирующего органа (Р.О.). При ручном дистанционном управлении ИМ оператор следит за перемещением регулирующего органа по указателю положения (УП), имеющего шкалу от 0 до 100% открытия.
Для создания систем регулирования, работающих по комбинированному принципу, измерительные блоки (ИБ) регулирующих приборов имеют возможность подключения нескольких датчиков по различным параметрам.
Обратные связи, как правило, включаются в регулирующих приборах с выхода управляющего блока (УБ) на его вход.
В аналоговых системах блочно – модульного принципа построения широко используются отдельные блоки (измерительные, суммирование, умножение, деление, извлечение корня, ограничения по минимуму и максимуму, релейного преобразования, динамического преобразования, дифференцирования и др.), комбинация которых позволяет выработать нужный закон управления. Все многообразие блоков можно разбить на группы в соответствии с их функциональными возможностями ввода–вывода информации, статического и динамического преобразования, оперативного управления и исполнительная часть. Это фактически те же функции, которые были рассмотрены выше на примере аппаратуры второго поколения. Рассмотрим эти функции в сокращенном варианте, которые позволяют составить упрощенную принципиальную схему электронных регуляторов любого, фактически, исполнения.
И.У. Это датчики для измерения различных параметров (давления, температуры, расхода, уровня, концентрации и т.п.). Они выпускаются промышленностью и их всегда можно подобрать по необходимому диапазону изменения параметров.
И.М. Чаще всего исполнительные механизмы выпускаются с двигателем, имеющим постоянное число оборотов. Любой исполнительный механизм имеет в своем составе электродвигатель, редуктор, конечные выключатели и датчики положения регулирующего органа (ДП).
Регулирующие приборы (аналоговые и цифровые) выпускаются промышленностью. Аналоговые регулирующие приборы предназначены для регулирования различных параметров и содержат измерительный блок (И.Б.), представляющий собой – фактически элемент сравнения (Э.С.) на схеме (рис. 5.3, 5.8), электронный блок (Э.Б.) – это фактически усилитель (У.У.), и встроенную обратную связь.
Для практической реализации системы регулирования, кроме этих устройств, необходимо в регулятор ввести дополнительные устройства, которых нет в структурной схеме. К ним относятся: задатчик (ЗД.) – для подачи заданного значения параметра в электрическом виде ; переключатель управления (П.У.) – для возможности перехода с автоматического регулирования на ручное (дистанционное); ключ управления (К.У.) – для возможности ручного перемещения регулирующего органа дистанционным включением исполнительного механизма; магнитный пускатель (М.П.) – для изменения порядка подключения фаз электродвигателя с целью включения его работы в одну и другую стороны; указатель положения регулирующего органа (УП), который работает от датчика перемещения (ДП) исполнительного механизма и имеет шкалу от 0 до 100% открытия.
Принципиальная схема электронного аналогового регулятора тогда будет иметь вид (рис.8.6).
Рис. 8.6. Принципиальная структурная схема регулятора при его технической реализации.
К регулирующему прибору может быть присоединено несколько датчиков. На схеме (рис. 8.6) дан пример присоединения датчиков по измерению трех параметров: Dпп–расход перегретого пара; Wв–расход питательной воды; Hб–уровень воды в барабане парового котла. По этой схеме строятся регуляторы уровня воды в барабанных паровых котлах.
Тема: Биохимические основы медицинской витаминологии.

