 2015-07-14
2015-07-14 76737
76737Учебное заведение: Не указано в источниках.. Тип материала: Учебное пособие
Система автоматического регулирования (САР) — это замкнутая автоматическая система, основанная на принципе обратной связи (ОС) — управлении объектом с использованием информации о результатах управления. Только в случае отрицательной ОС происходит измерение и сравнение фактического контролируемого параметра объекта x (t)с заданным на данный момент времени g (t),в результате чего выявляется ошибка (рассогласование) xε (r) = x (t) - g (t), которая служит стимулом процесса регулирования, на ее основе формируется регулирующее воздействие y (t).
В такой системе непрерывно идет обмен информацией между объектом и регулятором, воздействие передается от одного элемента регулятора к другому, последовательно меняя при этом свою физическую природу и уровень. Сформированное в результате регулирующее воздействие по своей природе может быть различно. Если, например, объект — электродвигатель привода подачи электродной проволоки, то регулирующее воздействие должно быть напряжением, подаваемым на его якорь; для сварочного источника питания регулирующее воздействие — это ток или напряжение, изменяемые в цепи управления.
Именно САР противодействует возмущениям, компенсирует, нейтрализует или ослабляет их вырабатываемыми встречными регулирующими воздействиями, обеспечивая заданное на каждый момент времени состояние объекта. Регулирование продолжается до тех пор, пока ошибка не становится меньше порога чувствительности системы.
Разнообразные САР отличаются одна от другой функциональными возможностями, принципами построения, конструктивной реализацией. По роду используемой энергии САР делят на электромеханические, электронные, пневматические, гидравлические, а также смешанного типа — электропневматические, электрогидравлические и др.
Все многообразие входящих в различные системы автоматики элементов по функциональному назначению может быть сведено в обобщенную функциональную схему САР (рисунок 5.4), состоящую из устройств, узлов, элементов, каждый из которых исполняет свою функцию в системе и графически изображается прямоугольниками, а также из связей между ними, изображаемых стрелками, указывающими направление прохождения сигналов (информации). Регулятор в таких схемах представляют в развернутом виде, а объект часто вообще опускают. Рассмотрим элементы САР.
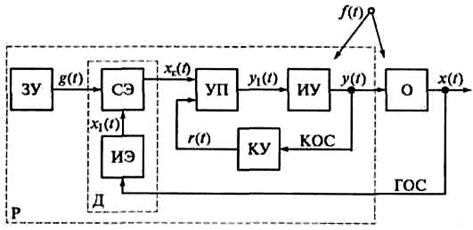
Р — регулятор; ЗУ — задающее устройство; СЭ — сравнивающее устройство; ИЭ — измерительный преобразователь; Д — датчик; УП — усилитель-преобразователь; КУ — корректирующее устройство; ИУ — исполнительное устройство; КОС — корректирующая обратная связь; О — объект; ГОС — главная обратная связь;
g (t) — задающее воздействие; f (t) — возмущение; x (t) — регулируемая величина; x 1(t), x ε(t) — сигнал и ошибка регулируемой величины; y (t) — регулирующее воздействие; y 1(t) — сигнал регулирующего воздействия; r (t) — дополнительное воздействие
Рисунок 5.4 – Функциональная схема системы автоматического регулирования
1. Датчик, или измерительный преобразователь (элемент ИЭ), измеряет действительную регулируемую величину x (t) и преобразует ее в сигнал х 1(t), удобный для дальнейшего использования (чаще всего в ток или напряжение).
2. Задающее устройство (ЗУ) формирует требуемое на каждый момент времени задающее воздействие g (t) в удобном для сравнения с х 1(t) виде, имитирующее заданное значение регулируемой величины x (t).
3. Сравнивающее устройство (элемент СЭ) выявляет и измеряет разность х 1(t) - g (t) и дает на выходе сигнал ошибки ε (t), пропорциональный отклонению действительной регулируемой величины Δ x (t) от заданного на данный момент значения. Часто сравнивающее устройство конструктивно объединяют с измерительным элементом.
4. Усилитель или усилитель-преобразователь (УП) усиливает и преобразует сигнал ошибки до величины y 1(t), достаточной и пригодной для управления исполнительным устройством (ИУ), преобразует входной сигнал количественно и (или) качественно, согласует вход исполнительного устройства с выходом СЭ по роду используемой энергии.
5. Исполнительное устройство под воздействием y 1(t) вырабатывает регулирующее воздействие y (t), поступающее на регулирующий орган (РО) объекта управления (О).
6. Корректирующее устройство (КУ) включают последовательно или параллельно названным элементам (на схеме показан последний вариант). Его назначение — улучшить качество регулирования объекта с помощью формирующихся в них дополнительных воздействий r (t).
Если выбранный для контролируемой системы параметр достаточно полно характеризует объект, то можно считать, что задача регулирования — поддерживать регулируемую величину на заданном уровне. Это позволяет при дальнейшем рассмотрении САР не изображать на функциональных схемах объект.
Некоторые элементы автоматической системы в отдельных случаях могут отсутствовать, но главная обратная связь (ГОС) должна функционировать всегда, ибо с ее помощью выявляется соответствие действительного состояния объекта регулирования состоянию, заданному на данный момент времени. Наличие ГОС — основной признак САР.
Автоматическое регулирование — это автоматическое поддержание заданной регулируемой величины (переменной состояния) объекта путем постоянного контроля его состояния и действующих на него возмущений, а также регулирующего воздействия (при необходимости) на его регулирующий орган.
Управляющее воздействие может быть неизменным (системы автоматической стабилизации), в этом случае его называют установкой (например, система автоматического поддержания напряжения дуги путем изменения ее длины в установках аргонодуговой сварки неплавящимся электродом; система поддержания напряжения дуги путем изменения скорости подачи электродной проволоки в аппаратах для дуговой сварки типа АДС-1000-4; система поддержания постоянства частоты вращения обечайки, в которой фактическая скорость измеряется тахогенератором).
В системах программного регулирования управляющее воздействие изменяется программным устройством по заранее назначенной программе в функции времени или перемещения (положения). Такие системы используют, например, для регулирования параметров режима сварки (тока, скорости сварки, скорости подачи проволоки, амплитуды или частоты поперечных колебаний электрода) в зависимости от пространственного положения электрода в установках для сварки неповоротных стыков труб; в электрогазорезательной машине «Кристалл» с программным управлением, предназначенной для газовой или газоэлектрической резки листов из стали или цветных сплавов.
Если САР вместо функциональной зависимости воспроизводит на выходе изменения входного воздействия, причем чаще на более высоком уровне мощности (т.е. реализует простую пропорциональную зависимость), а управляющее воздействие заранее неизвестно, произвольно, то такую САР называют следящей системой. Их применяют при электронно-лучевой, а особенно при дуговой сварке стыков большой протяженности (или криволинейных) для автоматической ориентации электрода относительно изделия, когда уход стыка из-за коробления и дефектов сборки заранее неизвестен. Используют следящие системы в сварочных манипуляторах и роботах.
Известны также САР, обеспечивающие изменение регулируемой величины по производной, интегралу или более сложной функции от задающего воздействия и др.
Факторы, обусловливающие отклонения (погрешность) x e(t) = x 0 - x (t) регулируемой величины x (t) от ее установленных значений х 0, называют возмущающими воздействиями f (t) (помехами, шумами, возмущениями), действующими на объект О автоматического управления (рисунок 5.5). Регулируемые величины, задающие и возмущающие воздействия могут быть различны по своей физической природе. Однако структурные схемы системы автоматического управления (регулирования) и решаемые с их помощью задачи не зависят от физической природы объектов управления.
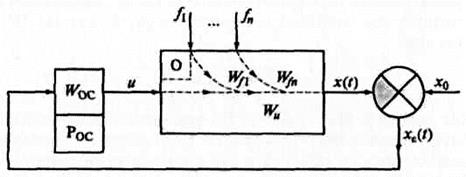
Поэтому принципы построения систем автоматического управления (САУ) вполне пригодны для различных по своей физической природе объектов управления. Если возмущающее воздействие при работе объекта может быть измерено в любой момент времени, то задача управления объектом может быть решена с помощью принципа компенсациивозмущения, действующего на систему (принцип разомкнутого управления по выходному параметру объекта). Этот принцип предполагает управление, основанное на возможности измерения возмущений fn, действующих на объект управления, и их компенсации через СУ (рисунок 5.6).
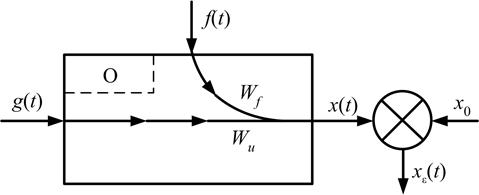
Wf и Wu — передаточные функции объекта соответственно по возмущению и по управлению; х 0 — установленное значение регулируемой величины; f (t) — возмущение; x (t) — регулируемая величина; x ε(t) — ошибка регулируемой величины;
Рисунок 5.5 – Схема воздействий на объект управления
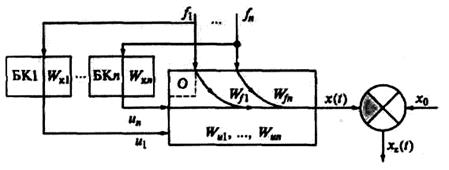
БК1...,БКn — блоки компенсации; W к1 ...,W кn — передаточные функции блоков компенсации; Wf и Wu — передаточные функции объекта соответственно по возмущению и по управлению; х 0 — установленное значение регулируемой величины; u1...,иn — управляющие воздействия; f (t) — возмущение; x (t) — регулируемая величина; x ε(t) —ошибка регулируемой величины
Рисунок 5.6 – Структурная схема системы управления по возмущению
Примером построения САУ по принципу компенсации является система регулирования напряжения в сварочном трансформаторе с помощью контроля изменения напряжения питающей сети Uc (рисунок 5.7).
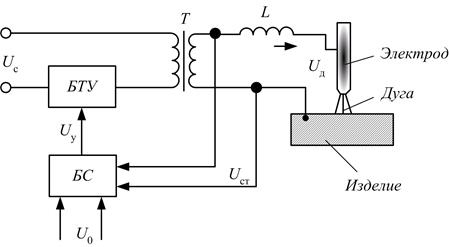
БТУ — блок тиристорного управления; БС — блок сравнения; L — индуктивность; U0 — эталонная уставка по напряжению сети; Uy — сигнал управления; Ûст — напряжение со вторичной обмотки трансформатора Т, I д — ток дуги
Рисунок 5.7 – Система регулирования напряжения в сварочном трансформаторе при возмущении по напряжению сети Uc
Принцип компенсации обеспечивает высокое быстродействие системы регулирования. Однако при построении таких систем обычно ограничиваются выделением и компенсацией небольшого числа возмущений, играющих основную роль в отклонении регулируемой величины объекта от ее заданного значения, оставляя некомпенсированными все остальные возмущения.
Для устранения этого недостатка в теории построения СУ более широко применяют принцип обратной связи. Этот принцип предполагает управление, основанное лишь на изучении отклонения х ε регулируемой величины х от ее заданного значения х 0 и непосредственно не связанное с измерением возмущений f1,..., fn, действующих на объект регулирования.
Для построения структурной схемы САУ замкнутой ОС (рисунок 5.8) необходимо, в отличие от САУ по возмущению (см. рисунок 5.6) лишь одно управляющее устройство — регулятор Рос с передаточной функцией Woc
индекс ОС относится к блоку обратной связи; Wf1 и Wfn — передаточные функции объекта соответственно по возмущению и по управлению; х 0 — установленное значение регулируемой величины; f(t) — возмущение; x(t) — регулируемая величина; x ε (t) — ошибка регулируемой величины; u — управляющее воздействие
Рисунок 5.8 – Структурная схема системы управления с обратной связью (принцип управления по отклонению)
К недостаткам принципа обратных связей следует отнести затруднения, возникающие в процессе разработки быстродействующих САУ, особенно для сложных инерционных объектов. Стремление повысить точность работы таких систем и увеличение коэффициента усиления регулятора Р0с могут привести к потере устойчивости.
Пример применения принципа ОС в САУ сварочными процессами приведен на рисунке 5.9. Регулируемая величина в данном случае — ширина обратного валика b. Измерительное устройство величины b — это фотодатчик, устанавливаемый с обратной стороны изделия, при расплавлении последнего дугой.
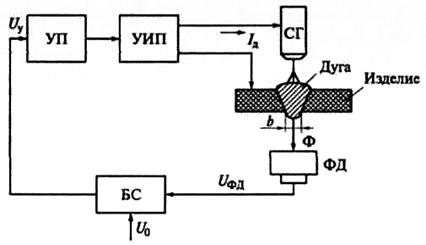
ФД — фотодатчик контроля проплавления; УП — усилитель-преобразователь; УИП — управляемый источник питания дуги; СГ — сварочная горелка; U фд — напряжение фотодатчика; Ф — световой поток; БС — блок сравнения; U0 — эталонная уставка по напряжению сети; Uy — сигнал управления; I д — ток дуги
Рисунок 5.9 – Система регулирования значения b — ширины обратного валика с фотодатчиком в цепи обратной связи
Недостатки САУ с ОС можно устранить созданием комбинированных автоматических систем управления, объединяющих оба отмеченных принципа управления (рисунок 5.10).
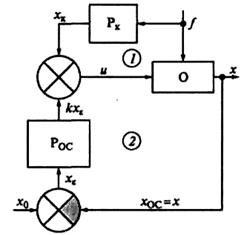
1 и 2 — контуры регулирования по возмущению и отклонению; Р к — регулятор в блоке компенсации; Р ос — регулятор в цепи обратной связи; х к— сигнал компенсации; индекс ОС относится к блоку обратной связи; х 0 — установленное значение регулируемой величины; f(t) — возмущение; u — управляющее воздействие;
Рисунок 5.10 – Принципы комбинированного управления
В подобных комбинированных системах основная тяжесть компенсации главного возмущения f, действующего на систему, ложится на регулятор Р к. Точный регулятор Р oс подавляет или ослабляет остальные возмущения, действующие на объект, и приводит действительное значение регулируемой величины х к заданной х 0. Пример использования комбинированного управления в сварочных установках приведен на рисунке 5.11. Принцип компенсации реализован в контуре 1, формирующем систему стабилизации напряжения на дуге U aпри возмущениях по длине дуги lд (при регулировании использована линейная связь U д = кl д). Контур 2 построен по принципу работы системы, представленной на рисунке 5.9. Регулируемая величина — это ширина обратного валика b.

1 и 2 — контуры регулирования по возмущению (длине дуги l д) и отклонению (ширине обратного валика b); УУ1 — привод перемещения СГ по вертикали; УУ2 — устройство управления параметрами УИП по сигналу от датчика проплавления (ДП); U вэ — уставка номинального параметра b; U д.э — уставка по напряжению дуги; U дп — сигнал на выходе ДП; УИП — управляемый источник питания дуги; СГ — сварочная горелка; Ф — световой поток; БС — блок сравнения; I д — ток дуги.
Рисунок 5.11 – Система комбинированного управления параметрами сварочного процесса

