2014-02-02
2014-02-02 1563
15631. Не действует принцип суперпозиции. В линейных САУ принцип суперпозиции позволял вычислять реакцию системы на сумму нескольких воздействий как сумму реакции на некоторое воздействие. В линейных САУ, при увеличении входного сигнала выходной сигнал увеличивался пропорционально, то есть характер переходных процессов (форма графика и устойчивость) не изменяются. В нелинейной САУ реакция на сумму воздействий не равна сумме реакций на отдельное воздействие:

2. В нелинейных САУ характер движения зависит и от формы входного сигнала и от его амплитуды.
САУ устойчива в “малом” и неустойчива в “большом”
3. Для нелинейных САУ характерным является режим незатухающих колебаний, возникающих из самого принципа работы. В этом случае мы не можем получить какого-то постоянного значения выходной величины. Автоколебания могут быть одночастотными и многочастотными. На одних частотах колебания будут устойчивыми, на других – нет.
4. В нелинейных САУ при затухании колебаний происходит изменение частоты колебаний.
5. Соединения нелинейных звеньев обладают рядом особенностей:
I. Некоммутативность (переставлять нельзя!).
II. Не всегда существует обратный оператор (у линейных  )
)
В результате выделяют два класса нелинейных систем:
I класс: удается сгруппировать все линейные звенья в одну группу, нелинейные – в другую.
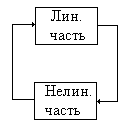
II класс: есть несколько групп линейных и нелинейных звеньев и они чередуются между собой.