 2014-02-02
2014-02-02 862
862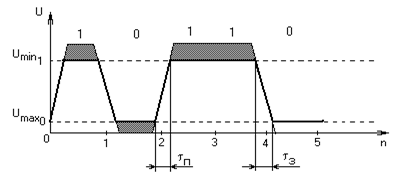 Различают статический (потенциальный), импульсный, динамический способы представления цифровой информации.
Различают статический (потенциальный), импульсный, динамический способы представления цифровой информации.
n-машинный такт
t-автоматное время
UН = 0; UВ = 1 => p-логика
UН = 1; UВ = 0 => n-логика
При использовании статической формы представления информации единица отображается высоким уровнем UВ, ноль низким уровнем UН .Этот способ определяет систему p-логики UН=0; UВ=1. В случае инверсного кодирования, т.е. UН=1; UВ=0, имеем дело с отрицательной n-логикой. Статический способ представления информации обладает высокой помехоустойчивостью, количественно определяемой значениями минимально допустимого потенциала представления единицы ( ) и максимально допустимого потенциала представления нуля (
) и максимально допустимого потенциала представления нуля ( ). Динамические свойства данной формы представления информации характеризуют длительностями переднего и заднего фронта такого унифицированного сигнала.
). Динамические свойства данной формы представления информации характеризуют длительностями переднего и заднего фронта такого унифицированного сигнала.
При использовании импульсной формы представления, единица отображается импульсом одной полярности, а ноль отсутствием импульса или импульсом противоположной полярности.
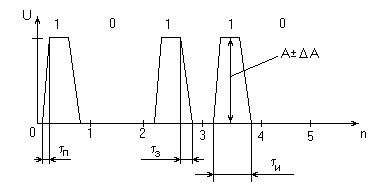 |
А - амплитудное значение, которое имеет допуск DА. Длительность импульса tп согласуется с величиной машинного такта n и не превышает его по величине.
Динамическая форма представления информации требует для отображения единицы генерации пакета сигналов, обычно периодических.
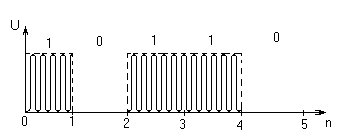 |
На приведенных диаграммах представлен последовательный способ передачи машинных слов, который может осуществляться младшими или старшими разрядами вперед. Последовательный способ передачи информации требует минимальных аппаратных затрат на генерацию входных и воспроизведение выходных сообщений. Последовательная передача кодов не обеспечивает в реальных случаях режима реального времени для МКС.








