 2021-11-13
2021-11-13 97
97Способы расчета ЦФ указанной категории являются достаточно специфическими и определяются конкретным назначением ЦФ. Рассмотрим несколько примеров.
На рис. 6.22 в упрощенном виде представлена структурная схема системы передачи речевых сигналов с уплотнением канала связи.
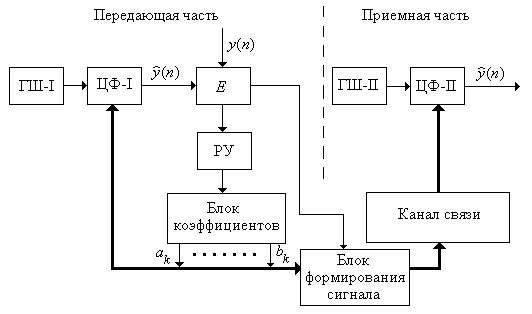
Рис. 6.22. Структурная схема системы передачи речевых сигналов.
Принцип действия этой системы основан на известном положении: "соответствующей фильтрацией спектральных составляющих "белого" шума можно воспроизвести любое заранее заданное колебание". Заданным колебанием на выходе ЦФ-I является речевой сигнал y (n), входным воздействием - цифровой "белый" шум, поступающий от шумового генератора ГШ-I.
Общее выражение для передаточной функции фильтра ЦФ-I имеет вид

Абсолютно точное воспроизведение сигнала y (n) на выходе ЦФ-I невозможно, для этого ЦФ-I должен иметь бесконечно большой порядок. Колебание ŷ (n) на выходе ЦФ-I воспроизводит заданный сигнал y (n) с ошибкой E, которая минимизируется до требуемого уровня решающим устройством РУ путем вариации коэффициентов фильтра ЦФ-I.
Примечательной особенностью рассматриваемой системы является то, что в канал связи поступает не речевой сигнал y (n), а непрерывно меняющиеся коэффициенты ak и bk фильтра ЦФ-I. Такой способ передачи заметно сокращает избыточность информации в речевом сигнале, что дает возможность существенного уплотнения канала связи.
В приемной части системы связи установлены фильтр ЦФ-II и генератор цифрового "белого" шума ГШ-II - точно такие же, как и в передающей части. Поступающие на фильтр ЦФ-II коэффициенты обеспечивают на его выходе воспроизведение сигнала в виде его оценочной формы ŷ (n).
Для оценки степени близости реальной выходной последовательности ŷ (n) к заданной y (n) используется критерий минимума среднеквадратичной ошибки (СКО), которая определяется в соответствии с выражением
 (6.103)
(6.103)
Представив в (6.103) реальную выходную последовательность  разностным уравнением БИХ-фильтра, получим:
разностным уравнением БИХ-фильтра, получим:
 (6.104)
(6.104)
Отсчеты x (n) поступают с генератора шума ГШ-I. Если порядки М и L нерекурсивной и рекурсивной частей фильтра известны, то СКО E в оценке выходной последовательности является функцией коэффициентов фильтра аk и bk.
Задача расчета Emin с использованием (6.104) весьма сложна. Решение ее достаточно эффективно может быть проведено методом адаптивной идентификации коэффициентов. Определение набора оптимизированных значений коэффициентов осуществляется в течение короткого интервала времени (порядка 1 мс). После этого с блока E в блок формирования сигнала подается команда на передачу данных, и оптимизированный набор коэффициентов поступает в канал связи и далее - в приемную часть.
Рассмотрим другие примеры.
Пусть на входе ЦФ1 действует последовательность x (n) с экспоненциальной огибающей:
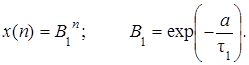
На выходе ЦФ1 требуется получить последовательность y (n) также с экспоненциальной огибающей, но с большей постоянной времени:

На рис. 6.23 схематично показаны условия поставленной задачи.
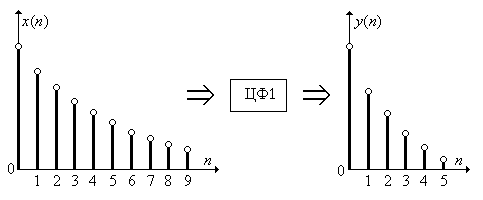
Рис. 6.23. Преобразование входного сигнала.
Определим z -формы X (z) и Y (z) заданных последовательностей x (n) и y (n):

и введем их в выражение для передаточной функции фильтра:
 (6.105)
(6.105)
График АЧХ и нуль-полюсная диаграмма рассчитанного ЦФ1 показаны на рис. 6.24.
Рис. 6.24. АЧХ и нуль-полюсная диаграмма ЦФ-I.
Следует особо отметить, что рассмотренный способ расчета имеет общий характер в том смысле, что результатом расчета может быть как БИХ-, так и КИХ-фильтр. Поясним это положение таким примером.

Рис. 6.25. Преобразование входной последовательности.
Пусть на входе фильтра ЦФ2 действует последовательность с экспоненциальной огибающей (рис. 6.25):

z -форма которой описывается выражением
Однако теперь выходная последовательность должна иметь прямоугольную огибающую и содержать только два отсчета: y (n) = 1, 1, 0, 0,... (рис. 6.25). Выражение для z -формы имеет вид: Y (z) = 1 + z -1.
Действуя описанным выше способом, получим передаточную функцию рассчитываемого ЦФ2:


Это передаточная функция КИХ-фильтра, нули которой равны: z 01 = - 1, z 02 = B. Графики ДИХ и АЧХ показаны на рис. 6.26.
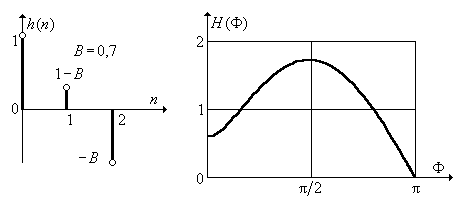
Рис. 6.26. ДИХ и АЧХ фильтра ЦФ-II.
Укажем еще на одну особенность, которую можно использовать в расчете ЦФ по заданным входным и выходным последовательностям.
Рассмотрим ЦФ с передаточной функцией:
 (6.106)
(6.106)
где H (z) - передаточная функция ЦФ с известными характеристиками (ДИХ, АЧХ и т.д.).
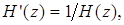
Представляя H (z) в самом общем виде: H (z) = Y (z)/ X (z), для H '(z) получим выражение: H '(z) = X (z)/ Y (z), из которого следует, что фильтр с передаточной функцией H '(z) получается путем инверсии H (z), т.е. перестановки числителя и знаменателя в передаточной функции H (z) исходного фильтра. Легко убедиться, что фильтр с передаточной функцией H '(z) отличается от фильтра с передаточной функцией H (z):
– нули функции H (z) превратились в полюсы, а полюсы - в нули;
– АЧХ H '(F) описывается функцией, обратной функции H (F);
– входная x (n) и выходная y (n) последовательности фильтра с передаточной функцией H '(z) поменялись местами по отношению к фильтру с передаточной функцией H (z).
Рис. 6.27. Нуль-полюсные диаграммы и АЧХ при инвертировании передаточной функции.
Отмеченные обстоятельства иллюстрируются на рис. 6.27, где приведены нуль-полюсные диаграммы и АЧХ двух фильтров, из которых один имеет передаточную функцию H (z), а другой - H '(z):

где r = 0,707; F = p/4; z 01 = 0,5; z П1 = 0,5.
На этом же рисунке схематично показано, что выходная последовательность y (n)фильтра с передаточной функцией H (z)становится входной последовательностью x '(n) фильтра с передаточной функцией H '(z), а входная последовательность x (n)фильтра с передаточной функцией H (z)становится выходной последовательностью y '(n) фильтра с передаточной функцией H '(z).
Рассмотрим возможность применения инверсии H (z) на конкретном примере. Пусть на входе фильтра действует цифровая последовательность, соответствующая зарядному напряжению U 0 конденсатора в RC -цепи:
 (6.107)
(6.107)
Цифровой фильтр должен воспроизвести на своем выходе только уровень U 0, исключив процесс установления, т.е. выходная последовательность y (n) должна иметь вид: y (n) = U 0 при n ³ 0. Такое требование может, например, иметь целью устранение задержки в определении неизвестного значения U 0. Условия задачи иллюстрируются на рис. 6.28.
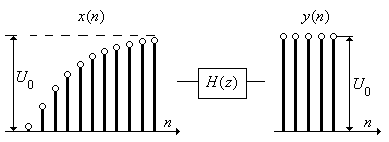
Рис. 6.28. Преобразование входного сигнала.
Каким образом решаются подобные задачи, мы уже знаем. Но в данном случае никаких расчетов производить не надо: достаточно обратить внимание на то, что входное воздействие x (n) подобно переходной характеристике g (n) фильтра с передаточной функцией
H (z) = a /(1- bz -1).
Как показано в подразделе 5.3, g (n) определяется выражением
Для совпадения g (n) с функцией x (n), определяемой по (6.107), необходимо, чтобы a /(1- b) = U 0.
Что касается выходного эффекта, то это - единичная функция, используемая для снятия переходных характеристик, но с измененным уровнем, равным U 0. Таким образом, передаточная функция H '(z) ЦФ, обладающего необходимыми свойствами, определяется соотношением (6.106), что для рассматриваемого случая дает:
H '(z) = 1/ H (z) = (1- bz -1)/(1- b) U 0.
В последнее выражение надо ввести масштабирующий множитель U 0 с тем, чтобы коэффициент передачи ЦФ для постоянной составляющей равнялся единице. Окончательно:

ДИХ полученного КИХ-фильтра имеет два отсчета: h (n) = 1/(1- b); - b /(1- b).
В качестве последнего примера рассмотрим, как можно спроектировать ЦФ, отвечающий следующим требованиям: на выходе ЦФ должна действовать цифровая косинусоида с частотой F = p:
y (n) = cosp n, (6.108)
при входном воздействии в виде цифровой постоянной составляющей
x (n) = 1, n ≥0,
действующей на неограниченном временном интервале.
На первый взгляд поставленная задача кажется невыполнимой. Действительно, как можно представить линейный фильтр, выделяющий гармоническое колебание из постоянной составляющей? Однако, то, что невозможно в аналоговой области, вполне реализуемо, как мы увидим, в области цифровой.
Воспользуемся общим определением передаточной функции ЦФ:
H (z) = Y (z)/ X (z). (6.109)
Поскольку входная x (n) и выходная y (n) последовательности заданы, то достаточно найти их z -формы и ввести в (6.109). В результате получим искомое выражение для передаточной функции заданного ЦФ.
Z -преобразование входной последовательности дает:
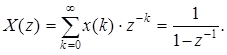 (6.110)
(6.110)
Для определения z -преобразования выходной последовательности используем материал Приложения 2. В принятых нами обозначениях z -преобразование последовательности y (n) при произвольном значении F равно:

а при заданном значении F = p
 . (6.111)
. (6.111)
Этот результат может быть получен еще проще, если иметь в виду, что цифровая косинусоида (6.108) с частотой F = p представляет собой последовательность знакопеременных единиц:
 (6.112)
(6.112)
С использованием (6.112) найдем z -преобразование Y (z):

что совпадает с (6.111).
Введем (6.110) и (6.111) в (6.109) и получим передаточную функцию ЦФ, способного "выделить" из постоянной составляющей гармоническое колебание:
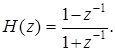 (6.113)
(6.113)
Рассмотрим поэтапно процесс формирования выходной последовательности y (n) = cosp n рассчитанного фильтра. Для этого представим (6.113) произведением двух функций:

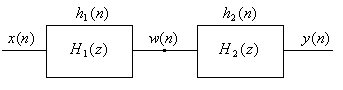
Рис. 6.29. Структурная схема для преобразования сигнала.
На рис. 6.29 приведена структурная схема устройства, соответствующая этому выражению. Фильтр с передаточной функцией H 1(z) является БИХ-фильтром 1-го порядка, ДИХ которого равна:
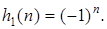 (6.114)
(6.114)

Рис. 6.30. Эпюры к структурной схеме на рис. 6.29: а) входная последовательность; б) ДИХ h 1(n); в) выходная последовательность 1-го каскада; г) выходная последовательность фильтра.
Действительно, z -преобразование над (6.111), так же, как и z -преобразование над (6.112), дает одно и то же выражение 1/(1 + z –1). На рис. 6.30,а показана входная последовательность x (n), а на рис. 6.30,б – ДИХ h 1(n).
Определим последовательность w (n) как свертку последовательностей x (n) и h 1(n):
 . (6.115)
. (6.115)
Поскольку x (n) = 1, то
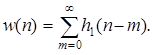
При фиксированном n значения m меняются от m = 0 до m = n. При этом текущий отсчет w (n) определяется суммой текущего отсчета h 1(n) со всеми его предыдущими отсчетами:
n = 0, w (0) = h 1(0) = 1,
n = 1, w (1) = h 1(1) + h 1(0) = 0,
n = 2, w (2) = h 1(2) + h 1(1) + h 1(0) = 1,
.................................
Последовательность w (n) изображена на рис. 6.30,в. Ее можно представить как "приподнятую" цифровую косинусоиду:
w (n) = 0,5 + 0,5cosp n (6.116)
Эта последовательность является входной для КИХ-фильтра с передаточной функцией H 2(z).
Нуль-полюсная диаграмма передаточной функции H 2(z) содержит один действительный нуль z 0 = +1. Коэффициент передачи фильтра определяется выражением:
 . (6.117)
. (6.117)
Подставляя в (6.117) значения F = 0 и F = p, найдем значения коэффициента передачи для постоянной составляющей: H 2(0) = 0 и на частоте F = p: H 2(F) = 2. Таким образом, при действии на входе фильтра последовательности w (n) на выход пропускается только гармоническая составляющая с амплитудой вдвое большей, чем в последовательности w (n): y (n) = cosp n. Эпюра последовательности y (n) приведена на рис. 6.30,г.
Описанный метод может быть использован для решения более сложных задач. Например, в рассмотренной задаче можно потребовать выделение на выходе фильтра цифровой косинусоиды с произвольно выбранной частотой F. Используя (6.110), и опуская промежуточные выкладки, приведем выражение для передаточной функции такого фильтра:
 .
.








