 2014-02-24
2014-02-24 782
782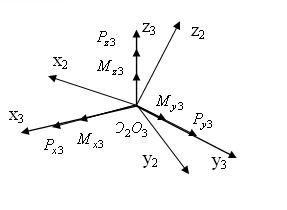
Нам необходимо по известной матрице жесткости, определенной во 2-ой системе координат (O2X2Y2Z2), определить матрицу жесткости в 3-ей системе координат (O3X3Y3Z3).
Проведем вывод формул для расчета матрицы жесткости в новой базовой системе координат.
 ;
;  ;
;
Заметим
 ;
;  ;
;  ;
;
D23 – матрица направляющих косинусов (матрица перехода); полностью и однозначно характеризует взаимное угловое положение двух систем координат.
 ;
;
 ;
;
Отметим, что
(6.1)
Матрицы направляющих косинусов принадлежат классу ортонормированных матриц, для которых справедливо равенство (6.1).
Для величин, заданных во второй и третьей системах координат, характерны следующие выражения:
 ;
; ;
;
 ;
; ;(6.2)
;(6.2)
Запишем уравнения равновесия в матричной форме:
 (6.3)
(6.3)
где
 ;
;  ;
;  .
.
В блочном виде уравнение равновесия (6.3) при  и
и  будет иметь следующий вид:
будет иметь следующий вид:
При
 . (6.4)
. (6.4)
При
 . ( 6.5)
. ( 6.5)
Для решения поставленной задачи (определения формул для перехода из исходной в новую базовую систему координат) подставим выражения (6.2) в систему уравнений (6.4):
 .
.
Умножим слева левую и правую часть этих уравнений на  :
:
 .
.
Так как согласно выражению (6.1)  ,
,
то окончательно уравнения равновесия получим в следующем виде:
 . (6.6)
. (6.6)
Сравнив выражения в системах уравнений (6.5) и (6.6), составленные для одного и того же упругого элемента, получим формулы пересчета матрицы жесткости в новой базовой системе координат с осями, развернутыми относительно исходной системы координат:
 ;
;
( ).
).
Формулы для расчета матрицы податливости в случае разворота осей базовой системы координат получаем аналогично:
 ;
;
 ; ;
; ;  .
.
При
 .
.
При
 ; (6.7)
; (6.7)
 ;
;
 ;
;
;
 . (6.8)
. (6.8)
Сравнивая выражения (6.7) и (6.8), приходим к выводу, что
 , где
, где  ().
().








