 2014-02-24
2014-02-24 508
508Назначение автоматического управления
ТЕМА 10. ПРИМЕРЫ СИСТЕМ И СХЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГЭУ ПОСТОЯННОГО ТОКА
ГЭУ, которые работают в режимах статистических характеристик элементов ГЭУ, не удовлетворяют современным требованиям по быстродействию и точности управления.
Например, при движении при волнении, когда момент сопротивления гребного винта периодически изменяется, ГЭУ со статистическими характеристиками теряют свои преимущества по сравнению с ТЗА. А у ледоколов не используется полная мощность тепловых двигателей, т.к. это при взаимодействии гребных винтов со льдом может привести к поломкам лопастей или даже потере гребных винтов. На многих судах применяются системы управления ГЭУ, обеспечивающие требуемую точность поддержания постоянства мощности тепловых двигателей в заданных режимах.
Системы автоматического управления ГЭУ действуют по отклонению какой-либо величины тока, напряжения, частоты вращения ГЭД, и т.п. Для таких систем схема управления должна содержать обратные и стабилизирующие связи. Для устойчивости системы применяют необходимые корректирующие связи и исследуют качество переходных процессов.
Оптимальность ГЭУ определяется двумя основными факторами: экономичностью эксплуатации при различных условиях плавания и качеством переходных процессов в электромеханической системе ГЭУ.
Исследования показали, что, если в переменных условиях плавания требуется экономить топливо, то основным законом управления ГЭУ является поддержание постоянства частоты вращения гребного винта.
А если требуется пройти расстояние с максимально-возможной скоростью – то законом управления ГЭУ является постоянное использование номинальной мощности тепловых двигателей. Системы управления ГЭУ должны быть оптимальны и по качеству переходных процессов при пусках, реверсах, остановках. Например, отклонение переходного процесса на 2-5с. Не сильно скажется на времени торможения или разгона судна из-за его инерционности.
А при взаимодействии винта со льдом у ледоколов система должна срабатывать быстрее и переходной процесс должен быть минимизирован (т.е. минимально-возможным), по заданному закону, который определяет переходной процесс для тока в главной цепи. Вид графиков переходных процесс показан на рисунке 10.1.
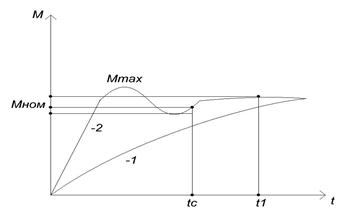
Рис.10.1. График переходного процесса при регулировании:
1 – без перерегулирования
2 – с перерегулированием
 м – допустимое перерегулирование
м – допустимое перерегулирование
Переходной процесс с перерегулированием позволяет сократить время для быстрейшего приведения величин (момента) к заданным значениям при допустимом ( 5 перерегулировании).
5 перерегулировании).








