 2014-02-24
2014-02-24 475
475Гребная электрическая установка имеет несколько переменных, подлежащих управлению. К ним относятся:
- ток электродвигателя;
- частота вращения;
- мощность;
- иногда еще и момент вращения.
Система управления становится многоконтурной.
Многоконтурные системы с последовательным включением управляющих устройств получили название систем подчиненного управления. Пример структурной схемы многократно замкнутой системы подчиненного управления имеет вид, показанный на рисунке 11.2.
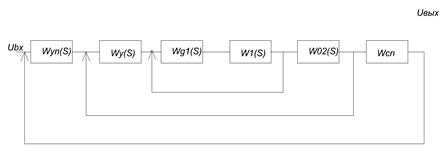
Рис.11.2. Структурная схема многократно замкнутой системы
Здесь:
-  ,
,  …
… - передаточные функции объектов управления;
- передаточные функции объектов управления;
-  ,
,  …
… - передаточные функции управляющих устройств;
- передаточные функции управляющих устройств;
-  ,
,  …
… - управляемые переменные величины.
- управляемые переменные величины.
В системе входной сигнал  проходит через все n - объектов управления и n- управляющих устройств и задает выходную величину .
проходит через все n - объектов управления и n- управляющих устройств и задает выходную величину .
Промежуточные (внутренние) управляющие устройства накладывают ограничения на все управляемые величины , … в соответствии с заданными законами управления.
в соответствии с заданными законами управления.








