 2014-02-24
2014-02-24 845
845Варианты схем управления вентильных ГЭУ
Одним из первых был разработан регулятор мощности, работающий по принцип подчиненного управления. Его схема (схема косвенного управления) показана на рисунке 10.2.
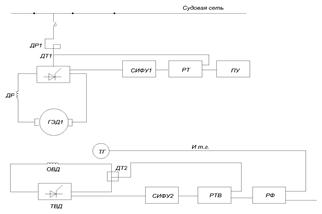
Рис.10.2. Схема регулятора мощности, работающего по принципу подчиненного управления
Данный регулятор изменяет магнитный поток ГЭД в зависимости от частоты вращения гребного винта и поэтому не является прямым регулятором измеряемой величины (мощности).
Частота вращения винта изменяется в зависимости от момента сопротивления и не поддерживается постоянной.
Схема содержит: регулятор тока двигателя – РТ; регулятор тока возбуждения двигателя – РТВ; регулятор магнитного потока двигателя – РФ, который совместно с регулятором РТ служит для поддержания постоянства мощности, потребляемой ГЭД; тахогенератор – ТГ; датчики тока ДТ1 и ДТ2, пост управления ПУ и системы импульсно-фазового управления вентилями – СИФУ1 и СИФУ2.
На схему задается напряжение  , соответствующие номинальной частоте вращения ГЭД в свободной воде. При
, соответствующие номинальной частоте вращения ГЭД в свободной воде. При  - магнитный поток соответствует
- магнитный поток соответствует  и
и  . Необходимый для этого сигнал управления подается на СИФУ2 тиристорного возбудителя двигателя ТВД.
. Необходимый для этого сигнал управления подается на СИФУ2 тиристорного возбудителя двигателя ТВД.
При увеличении момента сопротивления частота вращения ГЭД и ТГ уменьшается и  - снижается. Появившаяся разность
- снижается. Появившаяся разность  магнитный поток ГЭД. В результате произведение момента и частоты вращения ГЭД будет постоянным. Этому способствует ограничение тока, который поддерживается номинальным через СИФУ1 … косвенного регулирования мощности. Она создает значительное перерегулирование и в современных ГЭУ уже не применяются.
магнитный поток ГЭД. В результате произведение момента и частоты вращения ГЭД будет постоянным. Этому способствует ограничение тока, который поддерживается номинальным через СИФУ1 … косвенного регулирования мощности. Она создает значительное перерегулирование и в современных ГЭУ уже не применяются.
Наиболее целесообразно применять регуляторы прямого управления.
Регулятор мощности, управляемый по отклонению мощности. Схема такого регулятора с изменением магнитного потока ГЭД имеет вид, показанный на рисунке 10.3.
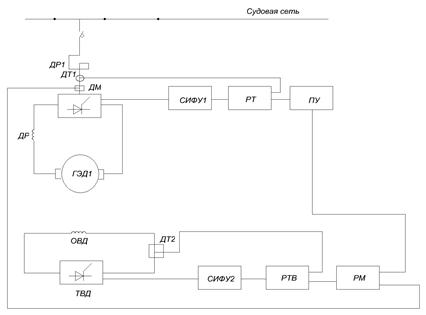
Рис.10.3. Схема регулятора мощности, управляемого по отклонению мощности
В данной схеме с поста управления задаются напряжения  и .
и .
Сигнал проходит через задатчик интенсивности в ПУ, т.е. нарастает постепенно, что особенно важно при начале хода судна. При неподвижном ГЭД сигнал, подаваемый на СИФУ1, соответствует большому углу открывания тиристоров -  и малому выпрямленному напряжению. По мере разгона ГЭД его противо-э.д.с. уменьшает ток, что увеличивает рассогласование, уменьшает
и малому выпрямленному напряжению. По мере разгона ГЭД его противо-э.д.с. уменьшает ток, что увеличивает рассогласование, уменьшает  на СИФУ1, увеличивает выпрямленное напряжение, восстанавливает значение номинального тока.
на СИФУ1, увеличивает выпрямленное напряжение, восстанавливает значение номинального тока.
На регулятор мощности подается сигнал управления , который сравнивается с напряжением от датчика активной мощности -  . При номинальном режиме работы (в швартовном режиме) разность напряжений равна 0 и СИФУ2 вырабатывает сигнал управления, соответствующий магнитному потоку ГЭД при номинальном режиме.
. При номинальном режиме работы (в швартовном режиме) разность напряжений равна 0 и СИФУ2 вырабатывает сигнал управления, соответствующий магнитному потоку ГЭД при номинальном режиме.
ТЕМА 11. СТРУКТУРНЫЕ СХЕМЫ РАЗЛИЧНЫХ САУ ДЛЯ ГЭУ
В общем случае полная компенсация инерционных звеньев САУ не проводится, а компенсируются только апериодические звенья с наибольшими постоянными времени. Но и компенсация больших постоянных времени действует только при малых отклонениях.
Структурные схемы разомкнутой скомпенсированной системы управления имеют вид, показанный на рисунке 11.1.

Рис.11.1. Структурные схемы разомкнутых систем управления








