 2014-02-24
2014-02-24 2156
2156 Монтаж индуктивного датчика, встраиваемого заподлицо
Монтаж индуктивного датчика, встраиваемого заподлицо
Выключатель, не изменяющий технических характеристик при окружении его металлом до плоскости активной поверхности.
 Монтаж индуктивного датчика, не встраиваемого заподлицо
Монтаж индуктивного датчика, не встраиваемого заподлицо
Выключатель, для сохранения технических характеристик которого требуется наличие вокруг чувствительного элемента зоны, свободной от материала, воздействующего на чувствительный элемент.
Лекция 11. Датчики положения для систем ЧПУ
 |
 | ||
 |
Практическое занятие №3 Многополюсные преобразователи угла
В системах автоматического управления и контроля наибольшее распространение получили три типа многополюсных электромашинных преобразователей угла: многополюсные вращающиеся трансформаторы (ВТ), индукционные редуктосины и индуктосины.
Как будет показано далее, многополюсные преобразователи позволят повысить точность преобразования и передачи угла путем создания двухканальных систем: с каналом грубого отсчета на двухполюсных ВТ и каналом точного отсчета на многополюсных преобразователях.
Многополюсные ВТ имеют такую же конструктивную схему, что и двухполюсные (см. рис. 4.4). Отличие заключается в том, что обмотки статора и ротора выполняются многополюсными (рм>1) и их взаимоиндуктивность изменяется по закону.
Мc=Мmaxsin рмΘ; Мк=Мmaxcos рмΘ (4.18)
Соответственно уравнения, полученные в параграфе 4.2 для двухполюсных ВТ, справедливы и для симметричных многополюсных вращающихся трансформаторов, если характеристики рассматривать в функции электрического угла Θэ = рмΘ.
Выпускаются и так называемые двухканальные ВТ, у которых на статоре и роторе в единой магнитной системе расположены двух- и много- полюсные обмотки. Если двухполюсная и многополюсная обмотки создают синусоидально распределенные ЭДС, то между ними нет потокосцепления взаимоиндукции и работа каналов является независимой. При этом снижаются габариты и масса устройства, упрощается совмещение нулей каналов грубого и точного отсчета.
Индукционные редуктосины – это по сути многополюсные вращающиеся трансформаторы с безобмоточным ротором. Статор редуктосина выполняется из листовой электротехнической стали или пермаллоя и имеет большое число зубцов Z1 на внутренней поверхности. Ротор выполняется в виде зубчатого колеса из электротехнической стали или также изготавливается из листового материала. Поскольку редуктосины часто используются в аналого-цифровых преобразователях, число зубцов ротора Z2 делают равным 2n (32, 64, 128). Соотношение Z1/Z2 может быть различным. В любом случае редуктосин состоит из определенного числа повторяющихся (элементарных) редуктосинов, равного наибольшему общему делителю Z1 и Z2.
Рис 4.8
На рис. 4.8, а в качестве примера изображена конструктивная схема повторяющейся части при Z1/Z2=5/4.
Первичная обмотка возбуждения В и выходные синусная С и косинусная К обмотки расположены на статоре. Катушки обмотки возбуждения размещены на каждом из зубцов, катушки выходных обмоток чередуются друг с другом. Выходные обмотки имеют дифференциальную схему соединения катушек, т.е. в каждой из пар катушки включены встречно по отношению к катушкам возбуждения. При протекании переменного тока по обмотке возбуждения создается поток, который наводит ЭДС взаимоиндукции во всех катушках выходных обмоток. ЭДС взаимоиндукции каждой катушки выходной обмотки определяется взаимоиндуктивностью с катушкой возбуждения, расположенной на том же зубце, взаимоиндуктивность в свою очередь определяется проводимостью воздушного зазора под зубцом. В редуктосине эта проводимость Λ является функцией угла поворота ротора Θ (рис. 4.8,б) и имеет постоянную Λ0 и переменную Λпер составляющие; последняя изменяется с периодом 360°/Z2. При дифференциальной схеме ЭДС взаимоиндукции, определяемые проводимостью Λ0, в парах катушек вычитается, а проводимостью Λпер- складываются. Результирующие взаимоиндуктивности выходных обмоток будут изменяться по закону
Мc=Мmax sin Z2Θ; Мк=Мmax cos Z2Θ (4.19)
Из сравнения (4.18) и (4.19) видно, что в индукционном редуктосине число пар полюсов электромагнитной системы рм равно числу зубцов ротора.
В реальных индукционных редуктосинах с целью уменьшения погрешности отображения функциональной (синусоидальной и косинусоидальной) зависимости выходные обмотки выполняются с “синусной” схемой распределения витков по катушкам, и катушки каждой из обмоток располагаются на всех зубцах.
Существенным достоинством индукционных редуктосинов является высокая надежность благодаря отсутствию скользящих контактов. Однако уровень сигнала у них ниже, чем у классических многополюсных ВТ.
Поворотный индуктосин представляет собой многополюсный поворотный трансформатор с плоским, а не цилиндрическим воздушным зазором и печатными обмотками на статоре и роторе (рис. 4.9а).
 |
Рис 4.9
В корпусе 1 расположены два диска – статор 2 и ротор 3, выполненные из изоляционного материала: керамики, стекла или пластмассы. На торцевых поверхностях дисков, обращенных друг к другу, расположены печатные обмотки, выполненные методом фотолитографии. На роторе (рис. 4.9б) обычно расположена однофазная обмотка возбуждения, у которой число проводников равно требуемому числу полюсов. Число пар полюсов в зависимости от области применения либо делают равным 2n (32-256), либо 180, 360. Напряжение переменного тока подается на обмотку ротора через контактные кольца 5, укрепленные на валу 4, и щетки 6 (рис. 4.9а). На статоре расположены две многополюсные обмотки, сдвинутые на электрический угол 90°, – синусная и косинусная.
При подаче переменного напряжения на обмотку возбуждения по ней течет ток и создается магнитный поток Ф, который наводит ЭДС взаимоиндукции в выходных обмотках статора. При повороте ротора изменяется взаимоиндуктивность обмоток статора и ротора и соответственно наводимые в обмотках статора ЭДС. При соответствующем выборе ширины проводников, их скоса и шага катушек взаимоиндуктивность будет изменяться по гармоническому закону, определяемому соотношениями (4.18). Достоинствами индуктосинов являются простота конструкции, высокая технологичность и точность изготовления обмоток методами фотолитографии, отсутствие влияния нестабильности характеристик ферромагнитных материалов. У современных индуктосинов асимметрия нулевых положений не превышает 1 – 3 угловых секунд. Недостатком индуктосинов является низкий уровень выходного сигнала- порядка 10–20 мВ. Объясняется это отсутствием магнитопроводов – мал поток Ф, и малым числом витков в выходных обмотках, а, как известно трансформаторная ЭДС Е=4,44 f Фmw. Уровень выходного сигнала может быть повышен за счет частоты f, поэтому современные индуктосины работают на частотах до 10 –100 кГц.
В заключение следует отметить, что в настоящее время изготавливаются также линейные редуктосины и индуктосины, непосредственно измеряющие линейные перемещения. Электромагнитная система таких устройств представляет собой развернутую на плоскости электромагнитную систему соответствующих поворотных устройств.
Практическое занятие №4 Принцип работы абсолютного энкодера
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
 |
Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код – это широко распространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:

Так выглядит в данном случае число 10 в двоичном коде. Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| числовое значение | двоичный код |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.
Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n. Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом "Complement". Выдаваемое значение может быть возрастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который легко реализуется с помощью цепи из логических элементов «исключающее или» (XOR) как программным, так и аппаратным способом.
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея – выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
| 0 1 2 3 | 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 | 0 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 |
| 4 5 6 7 | 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 | 0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
| 8 9 10 11 | 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 | 1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
| 12 13 14 15 | 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 | 1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
 |
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор***Исключающее или
Схема для преобразования Кода Грея в двоичный код.
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещается на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализуются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Практическое занятие №5 описание работы инкрементного датчика
Импульсный (пошаговый) энкодер относится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый энкодер периодически формирует импульсы, соответствующие углу вращения вала. Этот тип энкодеров, в отличие от абсолютных, не формирует выходные импульсы, когда его вал находится в покое. Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Пошаговый оптический энкодер состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
 |
Диск с метками инкрементного энкодера
Пошаговый энкодер может быть классифицирован в однофазный тип (только канал выход), который может быть использован, чтобы считать сумму импульсов или определять ускорение. Рассматривая интервал между импульсами и квадратурой энкодера (каналов A и выход B), можно также определить направление вращения вала (по-, или против часовой стрелки). Тип энкодера с нулевым индексом выхода (канал N) выдает импульс нулевой отметки за один оборот, чтобы корректировать ошибки в пределах каждого оборота. Более высокое разрешение (в два или в четыре) получается подсчетом как переднего, так и заднего края меток. Канал A и B генерирует импульсы с фазами, смещенными относительно друг друга на 90 градусов.
Квадратура выхода (выходы А и В)
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить - вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0°, допуск ±45° – приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
 |
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение:
(rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки / импульс полного оборота (выход N)
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Разрешение
– это количество выходных импульсов за вращение вала.
Соединительный вал
 |
Для механического соединения вала датчика с внешним механизмом следует использовать специальный соединитель (сцепление) гибкого типа, который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика. Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера. Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.
Лекция №12. Типовые способы измерения параметров производственных процессов
Там, где используются высокие мощности, например в коммутирующем оборудовании, электродвигателях, трансформаторах, что характерно для технологического оборудования механической обработки, необходимо осуществлять гальваническую развязку измерительных цепей датчиков от силовых цепей. Простейшим разделяющим элементом, обеспечивающим такую гальваническую развязку, можно считать электромагнитное реле. Наиболее современным решением задачи гальванической развязки является реализация этой развязки на оптроне. Чтобы датчики можно было практически использовать для подключения к системам автоматизации производственных процессов, в автоматизированных системах используются три измерительные схемы: мостовая, дифференциальная и компенсационная.
Мостовая измерительная схема. Мостовая измерительная схема, существующая в двух разновидностях (балансной и небалансной) изображена на рис. 3.1. В противоположных участках цепей измерительной схемы, называемых плечами моста, размещаются эталонные сопротивления R1, R2, R3 а также измеряемое сопротивление Rx. Для равновесия моста необходимо, чтобы произведения величин сопротивлений, установленных в противоположных плечах измерительного моста, были равны между собой.
 |
Рис. 3.1. Мостовая измерительная схема
При соблюдении условий равновесия измерительного моста напряжение на его выходной диагонали будет отсутствовать, т.е. Uвых = 0. При изменении измеряемого сопротивления Rx условия равновесия измерительного моста будут нарушаться и на этой диагонали появится соответствующий электрический сигнал. Повышения точности отсчета можно добиться, изменяя сопротивления R1 и R3, находящиеся в соседних плечах измерительного моста, таким образом, чтобы, несмотря на изменения измеряемого сопротивления Rx свести к нулю изменения выходного напряжения. Факт равенства нулю выходного напряжения фиксируется с помощью установленного в выходной диагонали измерительного моста прибора или устройства, называемого нуль-индикатором. Использование нуль-индикатора позволяет с большей точностью «ловить» момент равенства нулю выходного напряжения.
Дифференциальная измерительная схема. Для измерения емкостного сопротивления обычно используется дифференциальная схема. Такая схема также существует в двух вариантах. По первому варианту дифференциальной схемы, изображенному на рис. 3.2, а, как эталонное сопротивление 4, так и измеряемое емкостное сопротивление 7 включаются в электрические контуры, симметрично запитываемые переменным напряжением от трансформатора 2.
При равенстве эталонного 4 и измеряемого 1 емкостного сопротивлений противоположно направленные токи в этих контурах (I2 и I1), будут равными по величине, так что результирующий ток через измерительный прибор 3 оказывается равным нулю, поскольку этот ток представляет собой разность токов I1 и I2. При изменении величины измеряемого емкостного сопротивления показания измерительного прибора 3 будут отличаться от нуля и однозначно изображать эти изменения емкостного сопротивления. Такая схема называется дифференциальной именно потому, что она основана на вычитании токов I1 и I2.
 |
Рис. 3.2. Дифференциальные схемы измерений сопротивления: а – сизмерением разницы токов через измеряемое и эталонное сопротивления; б – с изменением ЭДС во вторичной обмотке; 1 – измеряемое сопротивление; 2 – трансформатор; 3 – измерительный прибор (для схемы а)или нуль-индикатор (для схемы б); 4 – эталонное сопротивление
Другой вариант измерения изменяющегося емкостного сопротивления с помощью дифференциальной схемы приведен на рис. 3.2. б. Здесь также происходит вычитание токов I1 и I2., но изменение измеряемого емкостного сопротивления 1 компенсируется изменением напряжения, снимаемого со вторичной обмотки трансформатора 2, так что ток через измерительный прибор 3 остается равным нулю. Величина ΔE, на которую нужно изменить исходное напряжение Е, однозначно определяет величину изменения измеряемого емкостного сопротивления. Приравнивание к нулю тока через измерительный прибор позволяет использовать его как нуль-индикатор, что повышает точность измерений. Для этой цели и применяется такой вариант дифференциальной схемы.
Компенсационная измерительная схема. Для использования сигнала от генераторных датчиков применяется компенсационная схема измерительная. Суть работы компенсационной схемы состоит в том, что подбирается значение ЭДС источника, равное ЭДС, генерируемой датчиком. Факт равенства подбираемой и генерируемой датчиком ЭДС определяется по отсутствию тока в соответствующем контуре. Факт же отсутствия тока в контуре определяется по показаниям прибора, являющегося нуль-индикатором. При этом не требуется измерять абсолютную величину протекающего тока, а требуется лишь определить факт равенства этого тока нулю. Этим и обусловливается высокая чувствительность компенсационной схемы с нуль-индикатором.
Практическое занятие №6 Цифровая обработка сигналов в системах управления и контроля
Информация, полученная с описанных ранее датчиков и используемая для целей автоматизации, как правило, вырабатывается в виде тех или иных электрических величин в аналоговой форме, т.е. она может принимать любые значения во всем диапазоне изменения. При цифровой форме представления информации она изображается некоторым электрическим кодом. Аналоговыми электрическими величинами, которые должны восприниматься, обрабатываться и тем или иным образом использоваться в дальнейшем, могут являться напряжение, сопротивление, сила тока, частота и сдвиг фазы.
Цифровая информация по сравнению с аналоговой более удобна для визуального отсчета и регистрации, для передачи на расстояние и для запоминания. Кроме того, цифровая информация меньше подвержена искажениям и влиянию помех, над ней проще выполнять требуемые операции. Можно также построить цифровой вычислительный процесс таким образом, чтобы во время вычислительной обработки исходной информации ошибки вычислений не возрастали, не накапливались и не запоминались.
Принципиальным достоинством цифровых устройств по сравнению с аналоговыми является отсутствие явления, называемого «дрейфом нуля», т.е. изменения показаний на выходе при неизменном значении входной величины. Принципиальным же недостатком цифровой информационной технологии по сравнению с аналоговой является более высокая сложность цифровых устройств, хотя они и строятся из повторяющихся однотипных ячеек. Более высокая сложность цифровых устройств обусловлена необходимостью реализации внутри каждой ячейки большого количества переключательных схем.
Большое число элементов, необходимое для выполнения цифровой обработки информации, приводит также к увеличению времени выполнения такой обработки. Однако современные технологические методы производства электронных устройств, обеспечивающие возможность размещения в единице объема большого числа переключательных элементов при малых общих габаритных размерах, высокой надежности, высоком быстродействии и небольшой стоимости, делают этот недостаток не очень существенным. Полученную тем или иным образом аналоговую величину, как правило, целесообразно преобразовывать в цифровую форму и представлять в виде кода некоторого числа. Для этих целей используются методы цифровой обработки сигналов (ЦОС).
Цифровая обработка сигналов – это дисциплина, изучающая дискретные и цифровые сигналы, системы их обработки, а также цифровые процессоры, реализующие данные системы. В ЦОС под термином «сигнал» понимают изменение параметров среды распространения в зависимости от передаваемого сообщения, описываемое функцией времени. В ЦОС различают четыре типа сигналов:
– Аналоговый (рис. 3.3.а) – это сигнал, непрерывный во времени и по значению. Описывается непрерывной (или кусочно-непрерывной) функцией времени  . Аргумент и функция могут принимать любые значения из некоторых произвольных интервалов:
. Аргумент и функция могут принимать любые значения из некоторых произвольных интервалов: ,
, .
.
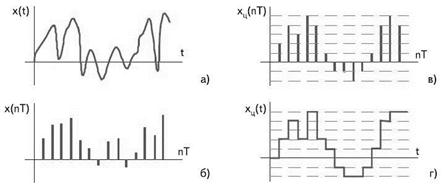 |
Рис. 3.3 Основные типы сигналов
– Дискретный (рис. 3.3.б) – это сигнал, дискретный во времени и непрерывный по значению. Представляет собой последовательность чисел, называемых отсчетами. Описывается решетчатой функцией  , где
, где  – номер отсчета, а
– номер отсчета, а  – интервал между отсчетами, называемый периодом дискретизации. Обратную величину
– интервал между отсчетами, называемый периодом дискретизации. Обратную величину  называют частотой дискретизации
называют частотой дискретизации  . Решетчатая функция определена только в моменты времени
. Решетчатая функция определена только в моменты времени и может принимать произвольное значение из некоторого произвольного интервала
и может принимать произвольное значение из некоторого произвольного интервала  .
.
– Цифровой (рис. 3.3.в) – это сигнал, дискретный во времени и квантованный по значению. Описывается решетчатой функцией, которая может принимать только конечное число значений из некоторого конечного интервала. Эти значения называются уровнями квантования, а соответствующая функция – квантованной.
– Цифро-аналоговый (рис. 3.3.г) – это сигнал, непрерывный во времени и квантованный по значению. Описывается непрерывной (или кусочно-непрерывной) функцией времени  , причем аргумент может принимать любые значения из некоторого интервала
, причем аргумент может принимать любые значения из некоторого интервала  , а сама функция – только конечное число значений из некоторого конечного интервала
, а сама функция – только конечное число значений из некоторого конечного интервала  , то есть является квантованной.
, то есть является квантованной.
В частотной области для описания сигналов используется преобразование Фурье. Оно представляет собой пару соотношений (функции прямого и обратного преобразования), которые устанавливают взаимнооднозначное соответствие между сигналом и спектром. Причем, под спектром понимается функция прямого преобразования Фурье, а под сигналом – функция обратного преобразования Фурье. Обобщенная процедура ЦОС включает три этапа:
– преобразование входного аналогового сигнала в дискретный сигнал;
– обработка дискретного сигнала по заданному алгоритму цифровым сигнальным процессором (ЦСП) и формирование выходного дискретного сигнала;
– преобразование дискретного сигнала в выходной аналоговый.
Система ЦОС, реализующая процедуру ЦОС, включает следующие компоненты (рис. 3.4):
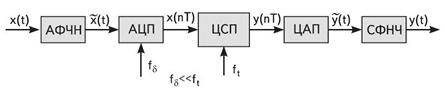 |
Рис. 3.4 Система цифровой обработки сигналов
– Аналоговый фильтр низкой частоты (АФНЧ). Обеспечивает корректность преобразования аналогового сигнала в дискретный.
– Аналого-цифровой преобразователь (АЦП). Формирует из аналогового сигнала  цифровой и выполняет две функции: дискретизацию во времени и квантование по уровням.
цифровой и выполняет две функции: дискретизацию во времени и квантование по уровням.
– Цифровой сигнальный процессор (ЦСП). Вычисляет по заданному алгоритму выходной отсчет  в зависимости от входного отсчета .
в зависимости от входного отсчета .
– Цифро-аналоговый преобразователь (ЦАП). Формирует цифро-аналоговый сигнал  .
.
– Аналоговый сглаживающий фильтр низкой частоты (СФНЧ). С его помощью сигнал преобразуется в аналоговый сигнал  .
.
При анализе дискретных сигналов удобно пользоваться нормированным временем:
 |
Таким образом, номер отсчета  интерпретируется как нормированное время. Переход к нормированному времени позволяет рассматривать дискретный сигнал как функцию целочисленной переменной. Представления дискретного сигнала
интерпретируется как нормированное время. Переход к нормированному времени позволяет рассматривать дискретный сигнал как функцию целочисленной переменной. Представления дискретного сигнала  и являются равнозначными. Используется то, которое наиболее удобно в каждом конкретном случае. Основной математической моделью для описания систем ЦОС служит разностное уравнение (уравнение вход-выход), связывающее входное воздействие и реакцию системы на него
и являются равнозначными. Используется то, которое наиболее удобно в каждом конкретном случае. Основной математической моделью для описания систем ЦОС служит разностное уравнение (уравнение вход-выход), связывающее входное воздействие и реакцию системы на него  :
:
 |
где  и
и  – весовые постоянные коэффициенты. Конкретный набор коэффициентов определяет алгоритм обработки дискретного сигнала. Описываемая этим соотношением цифровая система является линейной и называется линейной дискретной системой (ЛДС). Реализация ЛДС требует только трех операций:
– весовые постоянные коэффициенты. Конкретный набор коэффициентов определяет алгоритм обработки дискретного сигнала. Описываемая этим соотношением цифровая система является линейной и называется линейной дискретной системой (ЛДС). Реализация ЛДС требует только трех операций:
– умножения на постоянный весовой коэффициент;
– суммирования;
– задержки на один период частоты дискретизации (сдвиг).
Поставив в соответствие каждой операции графический символ (рис. 3.5) и объединив их в соответствии с разностным уравнением, получим еще одну модель представления ЛДС – структурную схему.
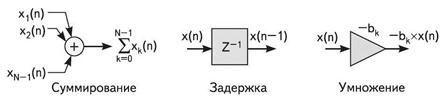 |
Рис. 3.5 Графическое изображение основных операций цифровой обработки сигналов
Пример реализации структурной схемы для разностного уравнения (РУ) вида
 |
показан на рис. 3.6.
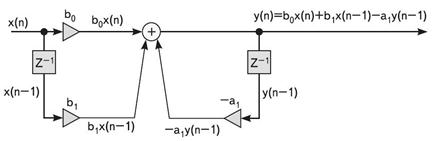 |
Рис. 3.6 Пример построения структурной схемы
При изучении цифровых систем в качестве испытательных воздействий используются дискретные сигналы, называемые типовыми.
Одним из примеров может служить цифровой единичный импульс u0(n–n0), равный единице при n = n0 и равный нулю при остальных значениях n: где n = 0, ±1, ±2, ±3…, n0 – целочисленная константа. Если ЛДС до момента поступления на вход единичного цифрового импульса u0(n–n0) находилась в нулевом состоянии, то есть x(n) = 0 и y(n) = 0 для всех n< n0, тогда выходной сигнал y(n) (реакция системы на сигнал u0(n)) называется импульсной характеристикой h(n) системы ЦОС.
Функционирование ЛДС происходит по тактам, равным по длительности периоду дискретизации. На рис. 3.7 показан процесс функционирования ЛДС, описываемой РУ, в случае поступления на вход единичного цифрового импульса, при условии n0 = 0.

Рис. 3.7 Функционирование системы ЦОС
Каждый такт включает несколько этапов:
1 этап – поступление текущего отсчета x(n) на вход системы ЦОС;
2 этап – вычисление текущего выходного отсчета y(n) в соответствии с выражением (2.17);
3 этап – поступление выходного текущего отсчета y(n) на выход системы ЦОС;
4 этап – формирование новой задержанной последовательности отсчетов x(n–i) и y(n–i) в соответствии с правилом: x(i) = x(i–1) и y(i) = y(i–1).
На следующем такте процесс повторяется.

