 2014-02-24
2014-02-24 1019
1019Общие сведения об электрических машинах
Электрическая машина – электромагнитное устройство, преобразующее механическую энергию в электрическую (генераторы) или электрическую в механическую (электрические двигатели).
Принцип действия электрических машин основан на законах электромагнитной индукции, Ампера и явлении вращающегося магнитного поля. Причем различаются принципиально машины постоянного тока и машины переменного тока.
В основе работы лежит вращающееся магнитное поле. Если генератор, то вращается магнит (электромагнит), если это двигатель, то вращается магнитное поле.
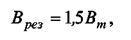
Основными частями синхронной машины являются неподвижный статор и вращающийся ротор. На статоре расположена трехфазная обмотка (АВС)
Cинхронный генератор. Рассмотрим принцип действия. Три катушки, смещенные в пространстве на угол 1200 (рис.45), помещают в ферромагнитную среду. Внутрь помещается магнит на оси, который приводится во вращение с угловой скоростью ω, тогда в обмотках на основании закона электромагнитной индукции начнут генерироваться ЭДС:
е Ах = Еm cosωt,
е By = Еm cos(ωt – 1200),
е Cz = Еm cos(ωt – 2400) = Еm cos(ωt + 1200), смещенные по фазе на 1200. То есть, получили трехфазный генератор. На практике вместо магнита помещается электромагнит, причем на больших скоростях движения он выполняется в виде бочки (неявнополюсный) (как у асинхронных двигателей, см. ниже).
Рис.45. Синхронная машина
Если к генератору подключить нагрузку, соединенную в треугольник либо звезду, то в обмотках образуются система трехфазных токов (см. выше).
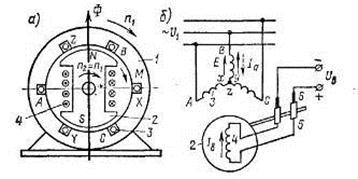
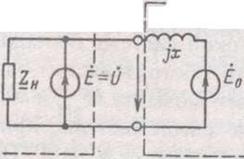
В целом любую фазу этого генератора можно представит эквивалентной схемой на рис. 46, а. Эта эквивалентная схема аналогична той, которая нами применялась для катушки со стальным сердечником. Отличие состоит в том, что ЭДС (Ė0) является основным продуктом, поэтому ток имеет направление, как показано на рис.46,а. Здесь
х = х рас + х я индуктивное сопротивление фазной обмотки статора, называемое синхронным реактивным (индуктивным) сопротивлением. Оно состоит из реактивного сопротивления обмотки статора (х я) и реактивного сопротивления, создаваемого потокам рассеяния, замыкаемыми по воздуху (х рас), r в – активное сопротивление проводов обмотки статора.
В свою очередь этой эквивалентной схеме отвечает уравнение (для комплексов действующих значений)
Ė = Ú + İ r в + İj x.
Уравнению соответствует векторная диаграмма на рис. 46,б. Отметим, что система трех катушек при протекании тока создает собственное поле с одной парой полюсов.
Именно на таких генераторах базируется вся силовая энергетика. При работе генератора с сеть, он должен держать частоту тока (50 Гц), поэтому практически все парогенераторы вращаются с одной скоростью 3000 об/мин. Однако гидрогенераторы вследствие конструктивных и технических особенностей должны вращаться медленнее 24 об/мин и медленнее. Поэтому для получения той же частоты увеличивают число полюсов обмотки статора дополнительными триадами катушек (увеличивая этим число полюсов машины), та как частота тока ω = ωвр п, где п – число пар полюсов.
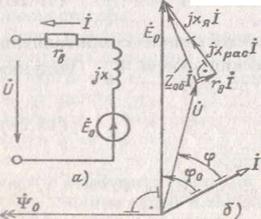
Рис. 46
Синхронный двигатель. Принцип действия его основан на взаимодействии вращающегося магнитного поля и магнита (электромагнита).
Здесь происходит обратный эффект генераторному режиму. Если питать три обмотки статора, смещенные в пространстве на угол 1200, трехфазной системой токов, то образуется вращающееся магнитное поле с индукцией в 1,5 раза более чем от одной катушки. Такое поле увлекает магнит, и они вращаются с одной частотой вращения, поэтому и название синхронный. Поясним рис.47, 48.
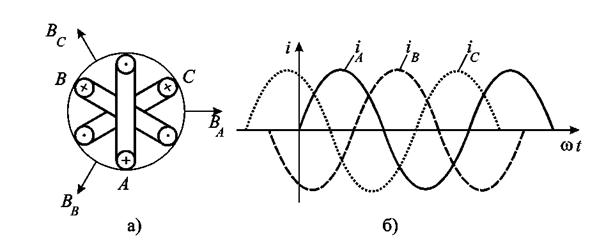
Рис.47 Схема расположения катушек при получении вращающегося магнитного поля (а) и график трехфазной симметричной системы токов, текущих по катушкам (б)
На рис.47, а показаны положительные направления токов в катушках и направления индукций магнитных полей ВА,ВВ,ВС, создаваемых каждой из катушек в отдельности.
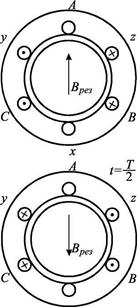
На рис. 48 показан вектор результирующего магнитного поля, создаваемого тремя катушками, в выделенные моменты времени. Анализ рис. 48 позволяет сделать выводы:
 t=0
t=0

Рис. 48. Направление индукции вращающегося магнитного поля в различные моменты времени
– индукция Bрез результирующего магнитного поля с течением времени меняет свое направление (вращается);
– частота вращения магнитного поля такая же, как и частота изменения тока. Так, при f=50 Гц вращающееся магнитное поле совершает пятьдесят оборотов в секунду или три тысячи оборотов в минуту;
– значение индукции результирующего магнитного поля постоянно:
где Bm - амплитуда индукции одной катушки.
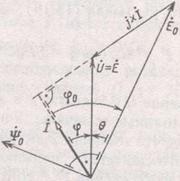
Схема замещения фазы статора с питанием от источника, если не принимать во внимание активное сопротивление обмотки статора 48, а.
На рис 48, б, векторная диаграмма, реализующая уравнение Ė0 + İj x = Ú (*). Заметьте, за счет сильного возбуждения обмотки ротора вектор (Ė0) сильно увеличен, поэтому ток (İ) опережает напряжение. Промышленность выпускает синхронные двигатели с опережающим cosφ =0,9
Рассмотрим некоторые свойств этого двигателя.
Основной характеристикой любого двигателя считается механическая, – зависимость момента на валу от частоты (скорости) вращения М = f(ω) или М = f(n), где n скорость вращения в об/мин. Пересчет – n = 60ω/2π.
|
 в) + –
в) + –
Рис.47 а – схематичный вид, б – электрическая схема, в – условное обозначение.

а б
Рис.48.
 Так как ротор следует за полем статора, то механическая характеристика имеет вид рис. 49. Такая характеристика считается абсолютно жесткой, и она не вскрывает основные свойства, такие как номинальная загрузка, возможность перегрузки др.
Так как ротор следует за полем статора, то механическая характеристика имеет вид рис. 49. Такая характеристика считается абсолютно жесткой, и она не вскрывает основные свойства, такие как номинальная загрузка, возможность перегрузки др.
ω
М
Рис. 49 Рис.50 Рис.51
Для этого используется угловая характеристика. Дело в том, что при работе двигателя тяговое усилие передается через магнитное поле. Взаимодействуют два поля: вращающееся поле статора и тянущееся за ним поле ротора. Связь упругая, но между векторами магнитной индукции поля статора и поля ротора появляется угол θ (рис 50) и этот угол увеличивается с возрастанием момента нагрузки на валу.
Электромагнитный момент, создаваемый на валу равный электромагнитному моменту, зависит от этого угла:
Характеристика изображена на рис. 51. Левая часть характеристики описывает устойчивый режим (с ростом момента на валу, растет угол). Правая часть характеристики не устойчивая, то есть при угле рассогласования векторов магнитной индукции свыше 900 двигатель выпадает из синхронизма, что сразу уменьшит ЭДС и следовательно увеличится ток (согласно уравнению *)
Номинальный режим двигателя соответствует θ = (25-35)0 . Отсюда перегрузочная способность двигателя (1,9-2,1)Мн.
Синхронные двигатели, вследствие сложного пуска и плохо переносящих ударную нагрузку, используют обычно в качестве привода компрессоров или вентиляторов. Промышленность выпускает их мощностью свыше 100 кВт.
В устройствах автоматики используются микродвигатели, имеющие ротор в виде постоянного магнита.








