2014-02-24
2014-02-24 1220
1220Угловое перемещение руля, необходимое для поворота судна, осуществляет-
ся с помощью силового электропривода.
Электроприводом производится перекладка руля, его остановка, реверсирование, регулирование скорости и т. д. В состав рулевого электропривода входит исполнительный электродвигатель ИД, передаточный механизм (рулевая машина) РМ, система управления рулем, система контроля (10.2).
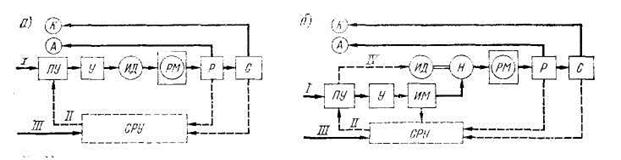
Рис. 10.2. Структурные схемы управления судном:
а – с использованием РЭМ-привода; б - с использованием РЭГ-привода;
I – ручное управление; II – автоматическое управление; III – управляющая программа; IV – изготовка; С – судно; Р – руль; ПУ – пост управления рулем; У -
усилитель; ИД – иполнительный двигатель; ИМ – исполнительный механизм
(насоса в электрогидравлических рулевых машинах); Н – насос переменной или постоянной производительности (в электрогидравлических рулевых машинах); РМ – рулевая машина; СРУ – счетно-решающее устройство (навигационный комплекс); А – аксиометр (рулевой указатель); К – репитер гирокомпаса
(сельсин-приемник гирокомпаса)
На рис. 10.2 показана общая структурная схема управления судном, где выходными звеньями являются руль Р и судно С.
Система управления включает в себя следующие элементы:
1. ПУ - пост управления (командное устройство).
Основной пост располагается в рулевой рубке. Он имеет переключатели для
перехода на предусмотренные виды ручного или автоматического управления рулем и элементы контроля исправного состояния наиболее важных звеньев привода;
2. У – усилитель.
Усилитель может быть линейный, полупроводниковый, релейный, электромашинный (генератор с приводным электродвигателем), магнитный, гидравлический, комбинированный;
3. СРУ - счетно-решающий судовой навигационный комплекс, вырабатывающий алгоритм управления, автоматически контролирующий выполнение маневров в соответствии с заданной навигационной программой.
Наиболее часто используются системы стабилизации судна на прямом курсе, где СРУ вырождается в систему автоматического регулирования по отклонению курсового угла.
Все элементы такой системы комплектуются в колонке основного поста управления.
Рис. 10.2, а характеризует структуру рулевого электромеханического (РЭМ) привода Здесь перекладка руля производится непосредственно исполнительным двигателем, который работает в повторно-кратковременном режиме с частыми пусками и торможениями.
На рис. 10.2, б представлена общая структура рулевого электрогидравлического (РЭГ) привода, где ИД вращает с постоянной скоростью насос Н. Управление рулем производится посредством сервомеханизма ИМ, изменяющего подачу масла на гидравлическую рулевую машину РМ.
Система контроля служит для проверки исполнения задания (действия) по перекладке руля и результатов его воздействия на судно. В систему контроля входит рулевой указатель - аксиометр А, позволяющий определить положение пера руля относительно диаметральной плоскости, и репитер гирокомпаса К, показывающий курс судна и его изменение. В современных рулевых приводах информационные приборы контроля встраиваются в пост управления.