 2014-02-24
2014-02-24 2914
2914Способы синхронизации распределителей в системах с временным разделением элементов сигнала.
Кодовый метод избирания в системах с временным разделением.
Кодовый метод избирания в системах с частотным разделением.
Прямое избирание в системах с временным разделением элементов сигнала.
Методы передачи информации ТУ-ТС. Прямое избирание с частотным разделением.
Классификация телемеханических систем. Структурная схема ТМ
Телемеханическими устройствами называются технические средства, с помощью которых обеспечивается преобразование и передача информации на расстояние с целью управления производственными или технологическими процессами. По характеру выполняемых функций их делят на устройства телеуправления (ТУ) и телеконтроля (TK); последние подразделяются на устройства телесигнализации (ТС) и телеизмерения (ТИ). Устройства ТУ служат для управления на расстоянии отдельными объектами или целыми производственными комплексами. Устройства ТС служат для контроля на расстоянии за состоянием или положением объектов управления (У) и контроля (К) и в основном передают информацию в виде двухпозиционных сигналов типа «Включено-отключено». ТС может передаваться на диспетчерский пункт периодически, автоматически в результате изменения положения или состояния одного из объектов или поступать на ДП по вызову (запросу) диспетчера, т.е. по команде, поступающей на контролируемый пункт по системе ТУ. Устройства ТИ служат для контроля на расстоянии за параметрами контролируемых процессов: напряжением, током и др.
Наряду с системами ТМ, предназначенными для выполнения какой-либо одной из указанных выше функций (ТУ, ТС, ТИ), широко используются также комплексные системы телемеханики, выполняющие все перечисленные выше функции или различные их сочетания. На рис. приведена классификация ТМ систем по различным признакам.
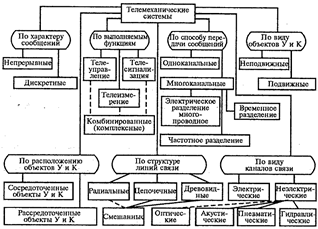
По характеру передаваемых сообщений – непрерывные и дискретные.
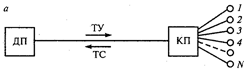
По расположению объектов управления и контроля — сосредоточенные и рассредоточенные (рис. 6.2);
По выполняемым функциям — ТУ,ТС,ТИ и комбинированные (комплексные);
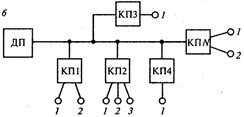
 По структуре линий связи — радиальная, цепочечные (лучевые), древовидные и смешанные;
По структуре линий связи — радиальная, цепочечные (лучевые), древовидные и смешанные;
По способу передачи сообщений — одноканальные и многоканальные с электрическим, частотным и временным разделением каналов;
По виду объектов управления и контроля — неподвижные и подвижные.
При передаче информации в системе телемеханического управления конечной целью является объект, на который она передается. Метод избирания (выбора) объекта в значительной мере влияет на принципы выполнения приемо-передающей аппаратуры. Различают три основных метода: прямой, групповой (адресный) и кодового избирания.
Прямое избирание характеризуется тем, что сообщение передается одним элементом импульсной серии (импульсом или паузой определенного качества).
На рис. представлена структурная схема частотной системы ТУ с
прямым избиранием.
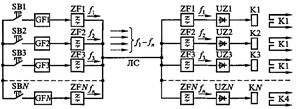 По каждому частотному каналу может передаваться одно сообщение. Всего система имеет N частотных каналов. На передающей стороне установлено
По каждому частотному каналу может передаваться одно сообщение. Всего система имеет N частотных каналов. На передающей стороне установлено
N частотных генераторов GF, которые запускаются при нажатии кнопок SB. Нажатие каждой кнопки соответствует определенному сообщению (приказу). Например, нажатие кнопки SB1 соответствует передаче приказа «Включить первый объект», при этом запускается частотный генератор GF1, вырабатывающий гармонические колебания частотой f1, которые проходят через полосовой фильтр ZF1 и передаются по линии связи ЛС на контролируемый пункт. Частотный импульс пропускается фильтром ZF1 приемного устройства, с помощью выпрямителя UZ1 преобразуется в импульс постоянного тока и поступает на реле К1. Оно срабатывает и включает первый объект. Фильтр ZF1, установленный в передающем устройстве, необходим для того, чтобы исключить попадание в ЛC гармоник, возникающих при модуляции и лежащих вне полосы частот первого канала.
Общее количество сообщений (команд), которые можно передать, пользуясь данной системой, соответствует числу частотных каналов N. За одну передачу можно передать все необходимые сообщения, предварительно набрав их нажатием определенных кнопок.
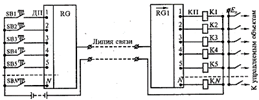 Прямое избирание можно осуществить, используя систему с временным разделением элементов сигнала.
Прямое избирание можно осуществить, используя систему с временным разделением элементов сигнала.
В этой системе в передающем и приемном устройстве используются синхронно работающие распределители RG и RG1. Набор сообщений производится нажатием кнопок SB1-SBN. Когда распределители передающего ДП и
 приемного КП устройств находятся на первой позиции, идет передача первого сообщения при нажатой кнопке SB1, которая поступает на реле К1, замыкающего своим контактом исполнительную цепь. При переходе распределителей во вторую позицию может быть передано второе сообщение. За цикл переключений распределителей с позиции 1 до позиции N можно поочередно передать все необходимые сообщения. Можно несколько видоизменить систему, посылая на каждой позиции распределителя импульсы с разными качествами, каждому из которых будет соответствовать определенное сообщение. В этом случае номер импульса можно отождествить с номером объекта, а качеству придать значение операций («Включить—отключить»). Часто используют два качества длительности импульса: например, короткий и длинный импульс (рис. случай II). Важным свойством системы ТМ с прямым избиранием является передача каждого сообщения по независимому частотному или временному каналу связи при общей физической линии связи. Таким образом, системы с прямым избиранием являются многоканальными.
приемного КП устройств находятся на первой позиции, идет передача первого сообщения при нажатой кнопке SB1, которая поступает на реле К1, замыкающего своим контактом исполнительную цепь. При переходе распределителей во вторую позицию может быть передано второе сообщение. За цикл переключений распределителей с позиции 1 до позиции N можно поочередно передать все необходимые сообщения. Можно несколько видоизменить систему, посылая на каждой позиции распределителя импульсы с разными качествами, каждому из которых будет соответствовать определенное сообщение. В этом случае номер импульса можно отождествить с номером объекта, а качеству придать значение операций («Включить—отключить»). Часто используют два качества длительности импульса: например, короткий и длинный импульс (рис. случай II). Важным свойством системы ТМ с прямым избиранием является передача каждого сообщения по независимому частотному или временному каналу связи при общей физической линии связи. Таким образом, системы с прямым избиранием являются многоканальными.
При прямом избирании за один цикл передачи можно передать одно, два или все возможные сообщения. Это свойство системы называется циркулярностью. Сообщения передаются одним импульсом, поэтому время его передачи при частотном разделении определяется длительностью импульса и является минимально возможным. В системе с временным разделением даже при передаче одного сообщения
распределитель должен сделать полный цикл переключений и опросить все позиции. Поэтому здесь можно говорить только о минимальном времени, затрачиваемом при циркулярной передаче на одну команду.
Кодовое избирание характеризуется тем, что каждое сообщение передается определенной кодовой комбинацией. Может быть использован любой код, чаще предпочтение отдается двоичному коду на одно сочетание.
 На рис. приведена структурная схема кодовой системы ТУ с
На рис. приведена структурная схема кодовой системы ТУ с
частотным разделением элементов сигнала.
В передающем устройстве команда набирается одной кнопкой из общего числа N. После нажатия кнопки SB команда подается на шифратор, где происходит преобразование кода на одно сочетание  , (нажата одна кнопка из множества N) в код, с помощью которого команда на линии связи передается на приемное устройство. Каждый элемент кода передается по своему частотному каналу. Генераторы гармонических колебаний GF1—GFN запускаются в соответствии с кодовой комбинацией, и частотные импульсы работающих генераторов проходит через частотные фильтры ZF1—ZFN в ЛС. На приемном устройстве каждый частотный импульс кодовой серии проходит через свой фильтр, поступает на преобразователь UZ, который преобразует его в импульс постоянного тока. Комбинация импульсов постоянного тока, аналогичная той, которая была на выходе шифратора, поступает на дешифратор, где расшифровывается, при этом на одном из его выходов, соответствующем номеру нажатой кнопки, появляется сигнал 1, который и поступает на соответствующее выходное реле К.
, (нажата одна кнопка из множества N) в код, с помощью которого команда на линии связи передается на приемное устройство. Каждый элемент кода передается по своему частотному каналу. Генераторы гармонических колебаний GF1—GFN запускаются в соответствии с кодовой комбинацией, и частотные импульсы работающих генераторов проходит через частотные фильтры ZF1—ZFN в ЛС. На приемном устройстве каждый частотный импульс кодовой серии проходит через свой фильтр, поступает на преобразователь UZ, который преобразует его в импульс постоянного тока. Комбинация импульсов постоянного тока, аналогичная той, которая была на выходе шифратора, поступает на дешифратор, где расшифровывается, при этом на одном из его выходов, соответствующем номеру нажатой кнопки, появляется сигнал 1, который и поступает на соответствующее выходное реле К.
 На рис. представлен процесс преобразования сообщения при передаче его с передающего устройства на приемное.
На рис. представлен процесс преобразования сообщения при передаче его с передающего устройства на приемное.
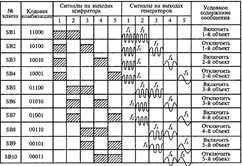
Например, для включения первою объекта необходимо нажать кнопку SB1. При этом на выходе шифратора появится кодовая комбинация 11000, т.е. на выходах 1 и 2 будут импульсы постоянного тока, на выходах 3,
4, 5 импульсы будут отсутствовать. Генераторы GF1 и GF2 при поступлении на их входы сигнала 1 запускаются и работают с частотами: GF1—f1, GF2 —f2. При нажатии другой кнопки будет передаваться другая кодовая комбинация, соответствующая другому сообщению. В каждой кодовой комбинации содержится два сигнала 1 и три — 0, т.е. используется двоичный код на одно сочетание  . С помощью
. С помощью
этого кода можно передать десять сообщений ( ).
).
Кодовое избирание широко используется в системах с временным разделением элементов сигнала (рис. 6.14).
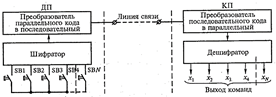 В такой системе кодовая комбинация параллельного кода на выходе шифратора с помощью преобразователя, на который она поступает, преобразуется в соответствующую комбинацию последовательного кода. Все ее элементы поступают в линию связи поочередно во времени. На КП с помощью преобразователя происходит обратное преобразование последовательного кода в параллельный. Комбинация параллельного кода поступает на дешифратор, на одном из выходов которого x1-xn появляется передаваемая команда. В кодовых системах за один цикл передачи можно передать только одну команду(сообщение), так как при одновременной передаче, например, двух кодовых комбинаций элементы одной невозможно отделить в приемном устройстве от элементов другой
В такой системе кодовая комбинация параллельного кода на выходе шифратора с помощью преобразователя, на который она поступает, преобразуется в соответствующую комбинацию последовательного кода. Все ее элементы поступают в линию связи поочередно во времени. На КП с помощью преобразователя происходит обратное преобразование последовательного кода в параллельный. Комбинация параллельного кода поступает на дешифратор, на одном из выходов которого x1-xn появляется передаваемая команда. В кодовых системах за один цикл передачи можно передать только одну команду(сообщение), так как при одновременной передаче, например, двух кодовых комбинаций элементы одной невозможно отделить в приемном устройстве от элементов другой
кодовой комбинации. Таким образом, кодовые системы не обладают свойствами циркулярности, а значит все сообщения в случае необходимости передаются поочередно. Полное время передачи всех сообщений в кодовых системах всегда больше, чем в системах с прямым избиранием.
При временном разделении каналов связи ТМ в передающем и приемном устройствах применяются распределители, которые должны переключаться синхронно и синфазно, т.е., двигаясь с одинаковой скоростью, одновременно переключаться на одну и ту же позицию. Рассинхронизация и сбой в работе распределителей приводят
к смещению элементов сигнала сообщения при приеме и искажению информации. Переключение распределителя из одной позиции в другую происходит при поступлении на его вход импульсов, которые принято называть продвигающими или тактовыми. Номер позиции, которую занимает распределитель, всегда соответствует номеру импульса, поступившего на его вход. Если в исходном состоянии распределитель находится в нулевой позиции, то первый тактовый импульс переключает его в первую позицию, второй — во вторую и т.д. Это свойство используется для синхронного переключения распределителей. Наиболее широко применяются три метода синхронизации: от общей
питающей сети переменного тока, циклическая и пошаговая (тактовая) синхронизация. Различие в методах синхронизации заключается лишь в способах образования тактовойсерии импульсов, подаваемых на распределители передающего и приемного устройств.
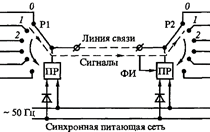 Метод синхронизации от обшей питающей сети основан на том, что напряжения в любой точке электрической цепи синхронны во времени, поэтому питающая сеть может быть использована в качестве генератора тактовых импульсов.
Метод синхронизации от обшей питающей сети основан на том, что напряжения в любой точке электрической цепи синхронны во времени, поэтому питающая сеть может быть использована в качестве генератора тактовых импульсов.
Положительные полуволны после выпрямления синусоидального напряжения сети служат тактовыми импульсами, которые поступают на приводы ПР распределителей Р1 передающего и Р2 приемного устройств.
Первоначально распределители находятся в нулевой позиции. Для одновременного запуска распределителей привод распр-ля ПР передающего устройства подключается к сети, а на привод ПР приемного распределителя передается специальный синхронизирующий (фазирующий) импульс ФИ, который переводит распределитель Р2
в нулевую позицию, если в этот момент он находился в другой, и подключает его к сети. После
фазирующего импульса первый импульс от питающей сети переводит распределители в первую позицию, начинается новый цикл переключений.
Недостатки:
*не всегда имеется общая питающая сеть;
*частота переключений определяется частотой напряжения питающей сети, которая составляет 50 Гц;
*при полном или частичном отключении питающей сети, когда нет напряжения
на диспетчерском или контролируемом пункте, работа телемеханики невозможна;
*напряжение питающей сети в удаленной точке может иметь значительный фазовый сдвиг, а сигнал в канале связи—запаздывание, в результате чего импульсы на приемном устройстве могут поступать на позиции распределителя, отличающиеся от тех, в которых они были переданы;
*невозможность резервирования питания устройств телемеханики другими источниками, например, применением аккумуляторной батареи.
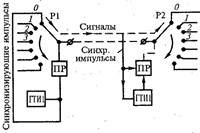 Метод циклической синхронизации заключается в применении индивидуальных генераторов тактовых импульсов ГТИ1 и ГТИ2 с
Метод циклической синхронизации заключается в применении индивидуальных генераторов тактовых импульсов ГТИ1 и ГТИ2 с
одинаковой частотой колебаний на передающем и приемном устройствах. Распределитель Р1 получает импульсы от генератора ГТИ1, а распределитель Р2 — от генератора ГТИ2. Запуск распределителей осуществляется синхронизирующим импульсом в нулевой позиции. На распределитель
Р2 синхронизирующий импульс поступает по каналу связи с передающего устройства. Он воздействует на привод ПР распределителя Р2 и генератор ГТИ2, устанавливая их в исходное состояние, в котором в этот момент находятся распределитель PI и генератор ГТИ1. Выполнить генераторы тактовых импульсов с абсолютно одинаковой и стабильной частотой практически невозможно. Разница частот генераторов
всегда будет существовать, и ошибка будет накапливаться с каждым шагом, что в конечном итоге вызовет рассинхронизацию распределителей. Это является существенным недостатком. Для предотвращения рассинхронизации необходима в конце каждого цикла передачи синхронизация ГТИ2 с помощью фазирующего или дополнительного импульса.
Метод тактовой синхронизации получил наиболее широкое применение, так как он обеспечивает наибольшую надежность. Этот метод заключается в том, что оба распределителя переключаются одним генератором тактовых импульсов
ГТИ. Начало работы распределителей определяется фазирующим  импульсом в начале цикла, когда распределители находятся в нулевой позиции. Если распределитель Р2 находится в другой позиции, то он устанавливается фазирующим импульсом в нулевую позицию.
импульсом в начале цикла, когда распределители находятся в нулевой позиции. Если распределитель Р2 находится в другой позиции, то он устанавливается фазирующим импульсом в нулевую позицию.
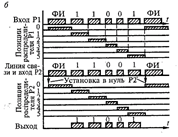 При таком методе синхронизации необходимы каналы связи для передачи тактовых импульсов и сигналов (информационных импульсов). Систему выполняют так, чтобы использовать один общий канал для информационных и тактовых импульсов. Для этого
При таком методе синхронизации необходимы каналы связи для передачи тактовых импульсов и сигналов (информационных импульсов). Систему выполняют так, чтобы использовать один общий канал для информационных и тактовых импульсов. Для этого
тактовым импульсам, которые передают на каждой позиции распределителей, придают дополнительный импульсный признак, например, временной. На втором рисунке показано, что для передачи сигнала 1 используется длинный импульс, а сигнала 0 — короткий. Переключение распр-й происходит в начале каждого импульса, независимо от его длительности. Импульсы отделяются друг от друга паузами одинаковой продолжительности. Фазирующему импульсу придают отличительный признак от сигналов 0 и 1, как правило, его выполняют длиннее длинного, т.е. сверхдлинным.
Синфазность работы распределителей передающего и приемного устройств должна обеспечиваться во всех случаях дополнительными методами. Конец каждого цикла сопровождается посылкой в канал связи специального фазирующего импульса, с помощью которого проверяется вся предшествующая передача. Если прием этого импульса не совпадает с переходом приемного распределителя в контрольную (обычно нулевую) позицию, то фиксируется сбой, принятое сообщение аннулируется, распределители принудительно переводятся в режим синфазной работы.
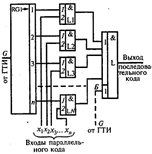 мультиплексор — преобразователь параллельного кода в последовательный; Мультиплексор содержит распределитель импульсов (регистр сдвига единицы RG1 —>), логические элементы И (LI — LN и выходной элемент ИЛИ (L). Входы 1 элементов L1 — LN подключены к выходам распределителя, а на входы 2 подаются сигналы параллельного кода. Распределитель RG1-» переключается импульсами G ГТИ и поочередно подает сигнал 1 на логические элементы L1 — LN. Если на вход 2 в этот момент поступает 1 параллельного кода, то на
мультиплексор — преобразователь параллельного кода в последовательный; Мультиплексор содержит распределитель импульсов (регистр сдвига единицы RG1 —>), логические элементы И (LI — LN и выходной элемент ИЛИ (L). Входы 1 элементов L1 — LN подключены к выходам распределителя, а на входы 2 подаются сигналы параллельного кода. Распределитель RG1-» переключается импульсами G ГТИ и поочередно подает сигнал 1 на логические элементы L1 — LN. Если на вход 2 в этот момент поступает 1 параллельного кода, то на
выходе элемента появляется сигнал 1, который через элемент ИЛИ (L) проходит на выход последовательного кода. Предположим, что на входы x1, х2, x3, хn поступила кодовая комбинация 1101.
 В момент нахождения распределителя RG1 —» в позиции 1 на входы логического элемента L1 поступают сигналы 1 и на выходе логического элемента L также будет сигнал 1. При переключении распределителя в позицию 2 на входах логического элемента L2 также совпадают сигналы 1 и на выход логического элемента L проходит сигнал 1. В позиции 3 распределителя на вход 1 - L3 поступает сигнал 1, а на вход 2—0, поэтому на выходе логического элемента L будет 0. В позиции n распределителя на входах 1 и 2 логического элемента LN совпадают сигналы 1 и на выходе будет сигнал 1. В результате на выходе мультиплексора будет комбинация 1101 последовательного кода. Дня создания разделительных пауз между элементами последовательного кода необходимо
В момент нахождения распределителя RG1 —» в позиции 1 на входы логического элемента L1 поступают сигналы 1 и на выходе логического элемента L также будет сигнал 1. При переключении распределителя в позицию 2 на входах логического элемента L2 также совпадают сигналы 1 и на выход логического элемента L проходит сигнал 1. В позиции 3 распределителя на вход 1 - L3 поступает сигнал 1, а на вход 2—0, поэтому на выходе логического элемента L будет 0. В позиции n распределителя на входах 1 и 2 логического элемента LN совпадают сигналы 1 и на выходе будет сигнал 1. В результате на выходе мультиплексора будет комбинация 1101 последовательного кода. Дня создания разделительных пауз между элементами последовательного кода необходимо
в выходной элемент ИЛИ ввести дополнительный вход Б, который образует с другими входами схему И. На этот вход сигнал 1 подается от ГТИ только во время импульса, а во время паузы — сигнал 0, схема
логического элемента L в течение времени, соотв-го паузе, будет закрыта.








