 2014-02-09
2014-02-09 1974
1974Количественный учет влияния реакции якоря на работу машины производится с помощью векторных диаграмм. Обычно с помощью векторных диаграмм определяется МДС обмотки возбуждения (или ток I B), необходимая для того, чтобы обеспечить заданный режим работы. Режим работы задается током якоря при данных значениях соsφ и напряжения на выводах генератора U.
Несмотря на то, что в установившемся режиме МДС обмотки возбуждения и МДС якоря, а также поля, ими созданные, неизменны во времени, они на векторных диаграммах изображаются как векторные величины. Это связано с тем, что все эти величины вращаются в пространстве и создают переменное потокосцепление с обмоткой рассматриваемой фазы, подобно тому, как переменные во времени, но неподвижные в пространстве МДС и поля.
Векторные диаграммы различны для явнополюсных и неявнополюсных генераторов.
При качественном рассмотрении процессов в генераторе в целях упрощения построений целесообразно пользоваться более простой векторной диаграммой, построенной без учета насыщения.
При построении такой диаграммы будем исходить из метода наложения, согласно которому считается, что в машине существуют два независимых потока: возбуждения и якоря. Каждый из этих потоков индуцирует в обмотке якоря ЭДС. Исходя из второго закона Кирхгофа, можно записать

где Е 0, Е α — ЭДС, индуцируемые в обмотке якоря от потоков возбуждения и реакции якоря соответственно; Z НГ — сопротивление нагрузки; U = IZ НГ — напряжение генератора.
В ненасыщенной машине поток якоря и индуцируемая им ЭДС будут пропорциональны току якоря I, т. е.

где хα — коэффициент пропорциональности, который в дальнейшем будем называть индуктивным сопротивлением реакции якоря.
Перепишем (33.3) в комплексном виде:

Подставляя (33.4) в (33.2), получаем

где хC=хσ+хα — синхронное индуктивное сопротивление или полное индуктивное сопротивление неявнополюсной синхронной машины. Исходя из (33.5), по заданным U, I и соsφ (φ>0) на рис. 1 построена векторная диаграмма. Ток возбуждения  , соответствующий найденной ЭДС Е 0, определяется по спрямленной части характеристики холостого хода (рис. 2).
, соответствующий найденной ЭДС Е 0, определяется по спрямленной части характеристики холостого хода (рис. 2).
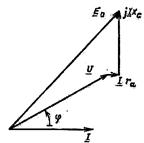
Рис. 1. Упрощенная векторная диаграмма неявнополюсного генератора без учета насыщения.

Рис. 2. Определение тока возбуждения по спрямленной части характеристики холостого хода.
В относительных единицах параметры неявнополюсных синхронных машин: синхронное индуктивное сопротивление x C*=1,2÷2,4, индуктивное сопротивление реакции якоря x α*=l,l÷2,3, индуктивное сопротивление рассеяния обмотки якоря x σ*=0,08÷0,15, активное сопротивление обмотки якоря r α*=0,002÷0,02. При переводе параметров машины в относительные единицы за базовое сопротивление принято отношение фазного номинального напряжения якоря к фазному номинальному току якоря.
Из приведенных данных следует, что активное сопротивление якоря очень мало по сравнению с индуктивными сопротивлениями. Поэтому при построении векторных диаграмм вектором I r α обычно пренебрегают.

