 2014-02-09
2014-02-09 470
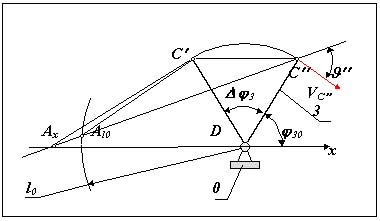
470а)четырехшарнирный механизм
|
Дано: [ J ], j 30 , D j 3, lDC
________________________________ Определить: l i -?
Решение проводится по схеме, которая изображена на рис. 10.13. Положение точки A определяется пересечением луча A С'', проведенного Рис. 10.13 в точке С'' под углом J = [J ] к вектору скорости VC'' :
- с окружностью радиуса l0 (точка Al0 );
- с продолжением оси х.
Затем, как описано выше, по размерам lAC'и lAC'' определяются длины звеньев 1 и 2.
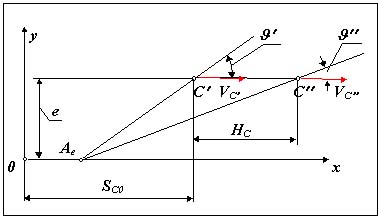
- центральный кривошипно-ползунный механизм (е = 0)
|
Дано: [ J ], S30 , HC, e
________________________________ Определить: l i -?
Решение проводится по схеме, которая изображена на рис. 10.14. Положение точки Ae определяется пересечением луча AС', проведенного в точке С' под Рис. 10.14 углом J = [J ] к вектору скорости VC' с продолжением оси х. Затем, как описано выше, по размерам lAC' и lAC'' определяются длины звеньев 1 и 2.
|
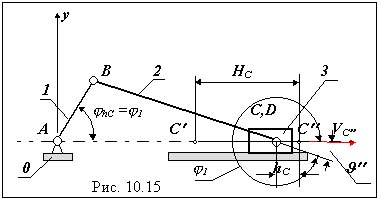
Дано: hC, j 1 = j hC,
l 2 = l2 / l1, e = 0
Определить: li -?
Спроецируем векторный контур lAB + lBC = lAC на оси координат:
l1 * cos j 1 + l2 * cos j 2 + hC = l1 + l2 ,
l1 * sin j 1 + l2 * sin j 2 = 0,
l1 / l2 * sin [ J ] или l2 / l1 = l 2 ;
откуда
l1 = hC / { 1-cos j 1 + [ 1 - cos (arcsin (l 2 ? sin j 1)]/ l 2 },
l2 = l1 / l 2 .








