2014-02-09
2014-02-09 5261
5261Агрегаты пневмомагистралей
Под понятием агрегаты пневмомагистралей (АПМ) в настоящем курсе объединены разнородные элементы, стоящие между сточником сжатого газа (ИСГ) и потребителем (приводом).
Задачи АПМ:
- подача сжатого газа на вход привода (трубки, соединения, уплотнения),
- стабилизация параметров сжатого газа (регуляторы давления),
- предотвращение аварийных ситуаций в пневмосистеме (сбросные клапаны, прорывные мембраны),
- управление потоками сжатого газа (электроклапаны).
Из всего многообразия указанных элементов ниж будут рассмотрены только некоторые.
Электропневмоклапаны (ЭПК) используются в пневмосистемах ЛА в качестве регулирующих или запорных органов, непосредствено воздействующих на газовые потоки. Коммутация газовых потоков осуществляется в соответствии с электрическими командными сигналами путем изменения проходных сечений переменных пневматических дросселей. Функциональная схема ЭПК может быть представлена следующим образом
где G вхи G вых- входной и выходной газовые потоки (G вх= G вых), I у - сигнал управления.
По принципу управления ЭПК делятся на:
- ЭПК преобразующие непрерывные сигналы, в этом случае реализуется зависимость
G вых= f (I у),
- ЭПК преобразующие дискретные сигналы управления, в этом случае реализуется зависимость
где I упор- пороговое значение управляющего сигнала.
Итак, ЭПК состоит из переменного дроселя того или иного вида и привода, обеспечивающего изменение проходного сечения этого дросселя. Для расчета указанных элементов ЭПК необходимо знать основные характеристики этих устройств.
Электромагнитный привод характеризуется мощностью управления (I у U у) и величиной тягового усития F э.
Переменный дроссель или, как принято называть его в данном устройстве, запорная пара характеризуется величиной проходного сечения А кл и усилием газового потока воздействующего на подвижный элемент запорной пары F н. При переменнгом дросселе сопло-заслонка проходное сечение определяется боковым зазором между соплом и заслонкой.
Для нормальной работы ЭПК необходимо обеспечить
Fэ > F н.
6 .2. Конструктивные схемы ЭПК.
Различные схемы ЭПК можно ранжировать по степени сложности.
- ЭПК прямого действия,
- ЭПК разгруженные от входного давления,
- двухкаскадные ЭПК или сервоклапаны.
Ниже приведены схемы ЭПК прямого действия и ЭПК разгруженного от входного давления.
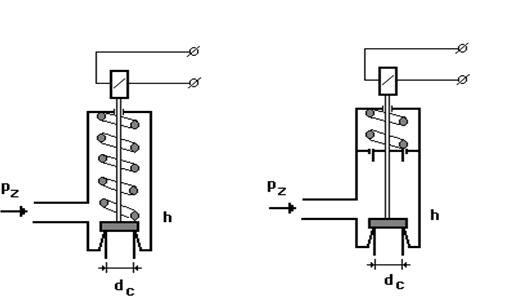 |
Основное различие приведенных схем ЭПК в величине усилия F mнеобходимого для перемещения подвижной системы. Для первой схемы
П м - предварительное поджатие клапана, d c - диаметр седла клапана. Для второй схемы
d п - диаметр поршня, который выбирается равным диаметру седла. В этом случае последние два слагаемых взаимно уничтожаются и усилие F mопределяется только поджатием пружины. Однако нужно иметь в виду, что и в этом случае усилие предварительного поджатия зависит от давления.
Предварительное поджатие, необходимое для создания уплотнительного контакта для плоской поверхности контакта определяется соотношением
П м = Dсрbq уп, кГс,
где Dср - средний диаметр уплотнения, b - ширина уплотнительной поверхности, q уд- удельное давление, необходимое для создания уплотнительного контакта. Удельное давление определяется по эмпирической формуле (Справочник машиностроителя, т.4, кн.2 стр.792. М:.Машгиз. 1963.)
a и c - постоянные коэффициенты (для резины а = 3...5, с = 0,4...0,5, для стали а = 35, с = 1), b - ширина уплотнительной поверхности, р р- рабочее давление (все величины в технической системе единиц). Из приведенных соотношений следует, что предварительное поджатие тоже зависит от рабочего давлениям и при высоких давлениях приводит к недопусимо большим усилиям, а большие усилия требуют применения больших приводов. При недопусимо больших приводах переходят к двухкаскадным клапанам (сервоклапанам).
В обоих рассмотренных случаях проходное сечение клапана А экопределяется величиной бокового зазора в запорной паре
А эк = dcx,
где d c - диаметр седла клапана, x - перемещение клапана. Обычно перемещение клапана равно перемещению якоря электромагнита.
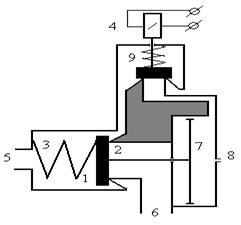
При больших величинах давления газового потока приводной электромагнит становится недопустимо большим, в этом случае применяют двухкаскадные ЭПК, схема которого приведена ниже. На схеме обозначено: 1 - клапан выходного каскада, 2 - седло клапана, 3 - пружина, 4 - электромагнитный привод первого каскада, 5 - входной штуцер, 6 - выходной штуцер, 7 - поршень, 8 - сбросной дроссель, 9 – клапан первого каскада.
В исходном положении оба клапана 1 и 9 закрыты. Клапан первого каскада 9 закрыт под действием пружины, клапан выходного каскада 1 закрыт под действием своей пружины и входного давления pz. При подаче сигнала управления на электромагнитный привод 4 клапан первого каскада 9 открывается и сжатый воздух по каналу поступает в полость над поршнем 7. Происходит одновременное наполнение через клапан 9 и опорожнение через дроссель 8 полости над поршнем. На подвижную систему выходного каскада действуют силы: в право – сила Пп пружины 3 и входного давления p z на площадь клапана Акл 1, в лево – давление p п в полости над поршнем на площадь Ап поршня 7. Так как площадь поршня достаточно велика, то при определенном давлении над поршнем клапан выходного каскада открывается, т.е становится р пАп > Пп + p zАкл.
При снятии сигнала с электромагнитного привода клапан 9 под действием пружыны закрывается. Сжатый газ из полости над поршнем стравливается через дроссель 8 и выходной каскад закрывается. Если дроссель 8 сделать управляемым (поставить маленький электроклапан), то получится электропневмоклапан с памятью.
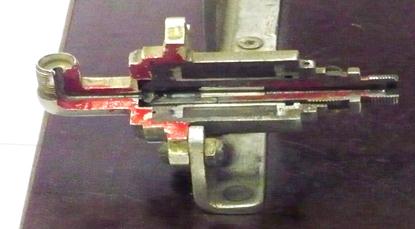
Вид конструктивного исполнения ЭПК прямого действия (ПЭКС-МАИ) приведн на рисунке ниже.
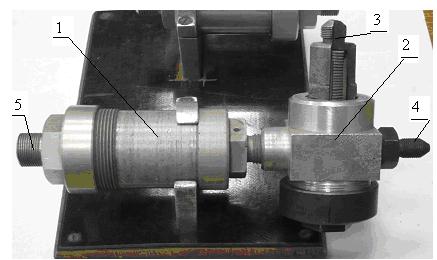
 Конструктивное исполнение двухкаскадного ЭПК (ЭК-МАИ-200) приведено на рисунке выше. Левая цилиндрическая часть конструкции (1) – электромагнитный привод, правая часть констркуции (2) – пневмомеханическая, 3 – входной штуцер, 4 – выходной штуцер, 5 – электрический разъем..
Конструктивное исполнение двухкаскадного ЭПК (ЭК-МАИ-200) приведено на рисунке выше. Левая цилиндрическая часть конструкции (1) – электромагнитный привод, правая часть констркуции (2) – пневмомеханическая, 3 – входной штуцер, 4 – выходной штуцер, 5 – электрический разъем..
6.3. Динамика электропневмоклапанов.
В соответствии со своей функцией ЭК преобразуют электрические командные сигналы в пневматические, при анализе их динамики приходится рассматривать три типа процессов:
- механические процессы,
- газодинамические процессы.
В связи со сложностью протекания процессов и их нелинейным характером задача исследования динамики ЭК часто сводится к определению времени срабатывания или времени установления давления в магистрали за клапаном. Задача решается путем по-этапного анализа работы ЭК и решения соответствующих дифференциальных уравнений с целью определения длительности каждого этапа. Общее время срабатывния ЭК определяется как сумма длительностей отдельных этапов. Рассмотрим последовательно однокаскадный и двух каскадный электроклапаны.