 2014-02-12
2014-02-12 1866
1866Развитие современного производства идет по пути создания высокоэффективных промышленных установок, обеспечивающих высокую интенсификацию технологических процессов, и систем управления ими. При этом постепенно был осуществлен переход от ручного управления технологическими процессами к автоматизированным и далее – к полностью автоматическим. Автоматизированной системой управления (АСУ) называется человеко-машинная система, обеспечивающая автоматизированный сбор и переработку информации, необходимой для автоматизации управления в различных сферах человеческой деятельности. АСУ технологического процесса (АСУ ТП) – это автоматизированная система управления для выработки и реализации управляющих воздействий на технологический объект управления в соответствии с принятым критерием качества управления. Основное назначение АСУ ТП состоит в оптимизации технологического процесса. В таких системах обеспечивается реализация совершенных законов управления и как следствие – наиболее эффективное ведение технологического процесса.
Для осуществления автоматического управления создаётся система, состоящая из управляющего объекта и тесно связанного с ним управляющего устройства. Как и всякое техническое сооружение, систему управления стремятся создать как бы конструктивно жёсткой, динамически «прочной». Эти чисто механические термины довольно условны и употреблены здесь в том смысле, что система должна быть способна выполнять предписанную ей программу действий, несмотря на неизбежные помехи со стороны внешней среды.
К объекту управления приложено два вида воздействий: управляющие - r(t) и возмущающее f(t); состояние объекта характеризуется переменной x(t):
 f(t)
f(t)
 r(t) объект x(t)
r(t) объект x(t)
Изменение регулируемой величины x(t) обусловливается как управляющим воздействием r(t), так и возмущающим, или помехой f(t). Дадим определение этим воздействиям.
Возмущающим называется такое воздействие, которое нарушает требуемую функциональную связь между регулируемыми или управляемыми переменными и управляющим воздействием. Если возмущение характеризует действие внешней среды на объект, то оно называется внешним. Если это воздействие возникает внутри объекта за счёт протекания нежелательных, но неизбежных процессов при его нормальном функционировании, то такие возмущения называются внутренними.
Воздействия, прикладываемые к объекту управления с целью изменения прикладываемой величины в соответствии с требуемым законом, а также для компенсации влияния возмущений на характер изменения управляемой величины, называются управляющими.
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Рис.1.
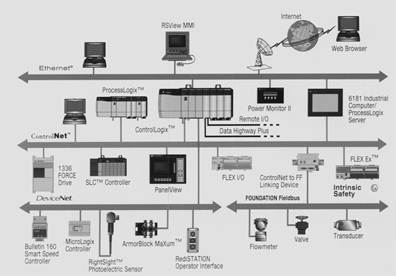
Рис. 1- Иерархическая структурная схема информационно измерительной и управляющей системы
Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения.
Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами.
Замена труда человека в рабочих операциях называется механизацией. Цель механизации состоит в высвобождении человека в тяжёлых операциях, требующих больших затрат физической энергии (земляные работы, подъём грузов), во вредных операциях (химические, радиоактивные процессы), в «рутинных» (однообразных, утомительных для нервной системы) операциях (завинчивание однотипных винтов при сборке, заполнение типовых документов, выполнение стандартных вычислений и т.п.).
Для правильного и качественного выполнения рабочих операций необходимы сопровождающие их действия другого рода - операции управления, посредством которых обеспечиваются в нужные моменты начало, порядок следования и прекращение рабочих операций, выделяются необходимые для их выполнения ресурсы, придаются нужные параметры самому процессу - направления, скорости, ускорения рабочему инструменту или экипажу; температура, концентрация химическому процессу и т.д. Совокупность управляющих операций образует процесс управления.
Операции управления так же частично или полностью могут выполняться техническими устройствами. Замена труда человека в операциях управления называется автоматизацией, а технические устройства, выполняющие операции управления, - автоматическими устройствами. Совокупность технических устройств (машин, орудий труда, средств механизации), выполняющих данный процесс, с точки зрения управления является объектом управления. Совокупность средств управления и объекта образует системы управления. Система, в которой все рабочие и управляющие операции выполняются автоматическими устройствами без участия человека, называются автоматической системой. Система, в которой автоматизирована только часть операций управления, а другая часть (обычно наиболее ответственная) выполняется людьми, называется автоматизированной (или полуавтоматической) системой.
АСУ ТП имеют единую конечную цель – обеспечение максимальной экономической эффективности процесса (например, при производстве запланированного количества продукции – обеспечение минимизации приведенных затрат).
Для достижения этой цели на технологическом объекте предусматривается ряд управляющих или регулирующих входов-воздействий, значения которых могут варьироваться в известных пределах и задача локальных систем автоматического управления состоит в том, чтобы, исходя из поставленной конечной цели, устранить неопределенности состояний управляющих воздействий. Другими словами, устройства ЛСАУ должны для каждого текущего момента определять оптимальное значение входов, обеспечивающее достижение максимума эффективности процесса. Для этого в системе управления осуществляется преобразования априорной и текущей информации о состояниях объекта и технологического процесса. Наилучший вариант решения задачи предполагает использование многоуровневой (иерархической) структуры преобразования информации в системе управления. Круг объектов и операций управления весьма широк. Он охватывает технологические процессы и агрегаты, группы агрегатов, цехи, предприятия, человеческие коллективы, организации и т.д.
Системы автоматического управления классифицируются по различным признакам.
o По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы.
o По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые.
o По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами.
o По виду контролируемых изменений своих свойств различают не приспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
o В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
В целевой классификации ЛАСУ ТП по типовым задачам управления, определяющей их назначение, можно выделить следующие группы:
o ЛСАУ ТП, обеспечивающие стабилизацию (поддержание) заданного рационального и оптимального технологического режима.
В системах стабилизации режимов металлообработки (рис.2) при изменении возмущающих воздействий, основной задачей является поддержание одного или нескольких параметров в соответствии с выбранными технологическими законами управления.
В общем случае ЛСАУ должна обеспечивать изменение двух параметров обработки, включать два контура управления: скоростью резания при изменении возмущающих воздействий, к основным к которым относится изменение глубины резания и твердости обрабатываемой заготовки. ЛСАУ ТП стабилизации содержит регулятор Р электроприводов шпинделя ЭПШ и подачи ЭПП, воздействующий на процесс резания ПР, и датчики информации ДИ1 и ДИ2 об обобщенных параметрах x1(t), x2(t). Информация о ходе технологического процесса поступает на микропроцессор МП от датчиков информации ДИ через устройство связи с датчиками УСД. Внешняя априорная информация ВАИ вводится в запоминающее устройство МП. Управление ЭШП и ЭПП осуществляется от МП через устройство связи с объектов УСО.
o ЛСАУ ТП, отрабатывающие с установленной точностью заданное или непрерывное задаваемое рациональное (оптимальное) изменение технологического процесса. Такие системы программного или следящего управления применяются в роботах-манипуляторах, лифтовых подъёмниках.
 |
|
 U з1 U о,с1 tp НВ
U з1 U о,с1 tp НВ
|
|

|



 - Uy1
- Uy1




|
U з2



|
 -
-
|
 | |||
 | |||
Рис. 2 - Система стабилизации режимов металлообработки
Лекция 2
Автоматические манипуляторы – промышленные роботы
Применение автоматических манипуляторов – промышленных роботов – позволяет заменить человека, занятого физическим трудом. В станкостроении они применяются в первую очередь для автоматизации смены деталей и инструмента. Промышленный робот – это переналаживаемая автоматическая машина, состоящая из механизма, информационно-измерительной, управляющей и исполнительной систем и предназначенная для выполнения механических действий в производственном процессе. Для управления роботами используются различные устройства. Для управления роботом с ограниченными манипуляционными возможностями используются цикловые устройства позиционного управления. Движение в заданном направлении в таких системах начинается с появления сигнала определенной полярности, а прекращается при срабатывании соответствующего конечного выключателя. Для управления роботом со значительным числом точек позиционирования находят применение числовые устройства позиционного управления, построенные по принципу синхронного микропрограммного автомата с жестким циклом управления.
o ЛСАУ ТП следящего типа.
Принцип действия схемы следящего электропривода (рис.3) копировальной системы с пропорциональным регулированием таков: двигатель М, вращающий механизм подачи станка, питается от преобразователя напряжения U. Задающим


|
|




|

 ВС В ВЕ
ВС В ВЕ Uб U Uy Uy,п
| |  | |||||
 | |||||||


|
 М
М  |
Рис.3 - схема следящего электропривода
элементом и датчиком положения являются сельсины ВС, ВЕ или поворотные трансформаторы с фазочувствительным выпрямителем UВ. Сигнал управления Uy усиливается усилителем А.
Характерной особенностью ЛСАУ ТП является высокая производительность переработки информации при практически неограниченном объеме памяти. Эта особенность базируется на применяемых в системах быстродействующих средствах вычислительной техники: программируемых контроллерах, микропроцессорах, управляющих вычислительных машин. Высокая информационная производительность управляемых вычислительных машин обеспечивает реализацию указанного назначения АСУ ТП.
Во внешней структуре ЛСАУ ТП могут быть выделены системы различных уровней или подсистемы ЛСАУ ТП, выделяемые по функциональному или структурному признаку, отвечающему конкретным целям и задачам. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а следовательно и рентабельность производства. Если функции системы ограничены одним механизмом, то она называется локальной. Примером тому может служить система безотходного пореза металла, управляющая подвижным упором ножниц обжимного прокатного стана. Эта локальная автоматизированная система управления технологическим процессом обеспечивает при раскрое минимум отхода металла с учетом срочности выполнения заказов. Она располагает информацией о длинах раската, стандартных длинах слябов, объёмах и сроках выполнения заказов и вырабатывает задание на перемещение упора для ЛСАУ ЭП.
Если механизмы, управляемые локальными системами, тесно связаны между собой технологическим процессом, то для их взаимной координации создается узловая автоматизированная система управления ТП. Объединение локальных ЛСАУ ТП в узловые может быть осуществлено по территориальному или функциональному признаку. В этом случае устанавливается общая ситуационная связь расположенный на одном агрегате рабочих органов или механизмов. Узловыми АСУ ТП являются, например, системы управления печами, клетями и механизмами склада продукции обжимного прокатного стана.
Существует большое разнообразие систем, выполняющих те или иные функции по управления технологическими и физическими процессами во всех областях техники. Виды локальных систем:
1. Станки - автоматы и автоматические линии (конвейеры)
3. Следящие системы (приводы подачи металлорежущих станков) Военная техника
4. Система управления телескопами
5. Система автоматического контроля (управления) технологического процесса
При автоматическом регулировании решаются, как правило, задачи трех типов:
· К первому типу задач относится поддержание на данном уровне одного или нескольких технологическим параметров. Автоматические системы регулирования, решающие задачи такого типа называются системами стабилизации. Примерами таких систем могут служить системы регулирования температуры и влажности воздуха в установках кондиционирования воздуха, давления и температуры перегретого пара в котлоагрегатах, числа оборотов в паровых и газовых турбинах и др.
· Ко второму типу задач относится поддержание соответствия между двумя зависимыми или одной зависимой и другими независимыми величинами. Системы, регулирующие соотношения, получили название следящих автоматических систем, например локальные автоматические системы регулирования соотношения «топливо-воздух» в процессе сжигания топлива или соотношения «расход пара-расход воды» при питании котлов водой и др.
· К третьему типу задач относится изменение регулируемой величины во времени по определенному закону. Системы, решающие такие задачи, называют системами программного регулирования. Характерным примером такого типа локальных систем является система регулирования температуры при термической обработке металла.
В последние годы широко применяют экстремальные автоматические системы, обеспечивающие максимальный положительный эффект функционирования технологического объекта при минимальных затратах сырья, энергии и т.п.
Совокупность технических средств, с помощью которых одну или несколько регулируемых величин без участия человека-оператора приводят в соответствие с их постоянными или изменяющимися по определенному закону заданными значениями путем выработки воздействия на регулируемые величины в результате сравнения их действительных значений с заданными, называют автоматической системой регулирования (АСР).
В состав простейшей АСР должны входить следующие элементы:
· Объект регулирования (ОР);
· Измерительное устройство (ИУ), измеряющее регулируемую величину и преобразующее ее в форму, удобную для дистанционной передачи. Основное требование к средствам измерительной части ЛСАУ ТП - это обеспечение необходимой точности измерений. Выходной сигнал первичных преобразователей является в подавляющем большинстве случаев аналоговым. При этом, тип энергии носителя сигнала, как правило, тот же, что и в информационно-управляющей и исполнительной частях ЛАСУ ТП (это избавляет от необходимости введения вторичных измерительных преобразователей для согласования различных типов сигналов). Первичные измерительные преобразователи располагаются обычно вблизи точек измерения параметров, т.е. рассредоточены по контролируемому объекту и часто работают в неблагоприятных условиях при высоких температуре, влажности, уровне вибраций в магнитных полях и т.п.
· Задающее устройство (ЗУ), из которого поступает сигнал, определяющий заданное значение или закон изменения регулируемой величины;
· Суммирующее устройство (СУ), в котором действительное значение регулируемой величины сравнивается с предписанным ее значением и выявляются отклонения;
· Регулирующее устройство РУ), вырабатывающее при поступлении на его вход отклонения регулирующее воздействие, которое необходимо подать на объект регулирования, чтобы устранить имеющееся отклонение регулируемой величины от предписанного значения;
· Исполнительный механизм (т.е. устройства для привода запорной и регулирующей арматуры) ИМ. В состав исполнительной части ЛСАУ ТП входят устройства, влияющие на ход физических процессов в объекте управления. К их числу относятся исполнительные механизмы и усилители мощности сигналов-команд, поступающих из информационно-управляющей части ЛСАУ. По типу энергии, используемой для привода, исполнительные механизмы можно разделить на электрические, пневматические, гидравлические. Усилители мощности исполнительных устройств управляют подводом энергии к приводу исполнительного механизма в соответствии с управляющими сигналами-командами. Усилители мощности тоже бывают электрические, пневматические, гидравлические. Но могут быть и комбинированные усилители (например, электрогидравлический – для управления гидравлическим приводом при электрических управляющих сигналах). Назначение электрических усилителей мощности обычно сводится к включению и отключению двигателя исполнительного механизма в соответствии с поступающими командами. Основное требование к устройствам исполнительной части ЛСАУ ТП – это надежность исполнения управляющих сигналов-команд. Для выполнения этого требования исполнительные механизмы и усилители должны прежде всего развивать достаточную мощность. Вторым условием надежного исполнения команд является безотказность самих исполнительных устройств и прежде всего исполнительных механизмов, располагаемых вблизи запорно-регулирующих органов и потому часто работающих в тяжелых условиях.
Регулирующее устройство в общем случае является сложным функциональным элементом, формирующим закон регулирования и обеспечивающим возможно быстрое восстановление предписанного значения регулируемой величины. При этом учитываются характер отклонения, его значение, скорость нарастания отклонения и т.п. Для увеличения быстродействия в РУ при формировании закона регулирования используют маломощные сигналы. Соответственно на выходе РУ регулирующее воздействие имеет небольшую мощность и, кроме того, выдается в форме, непригодной в общем случае для непосредственного воздействия на объект регулирования. Для усиления регулирующего воздействия и преобразования его в форму, пригодную для воздействия на объект регулирования, применяют специальные исполнительные механизмы, являющиеся исполнительными выходными устройствами регулирующего элементы, формирующего закон регулирования:
· Регулирующий орган (РО). Исполнительные механизмы выпускаются промышленностью унифицированными. Из-за огромного разнообразия объектов регулирования в большинстве случае исполнительный механизм не может непосредственно воздействовать на регулируемую величину. Поэтому объекты регулирования снабжают специальными регулирующими органами, через которые ИМ воздействует на величину;
· Линии связи, через которые сигналы передаются от элемента к элементу в локальной системе. В качестве линий связи для передачи электрических сигналов в ЛСАУ ТП используют, как правило, электрические кабели и провода.
Совокупность частей локальной системы автоматического управления технологическим процессом называют структурой системы.





|
|
|

|
 |

