2014-02-12
2014-02-12 3765
3765Классификация объектов управления.
Системный подход к проблеме классификации объектов позволяет сравнительно четко выделить несколько основных классификационных признаков, позволяющих раскрыть внутреннюю структуру объекта и его связи (рис. 2). По внешним связям объекта со средой, т.е. по количеству входных и выходных величин, объекты делятся на одномерные (имеющие одну входную и одну выходную величину) и многомерные (имеющие несколько входов и выходов). Примером одномерного объекта может служить электрический двигатель постоянного тока, у которого частота вращения якоря (при постоянном моменте нагрузки) приблизительно однозначно связана с подводимым к якорю напряжением.
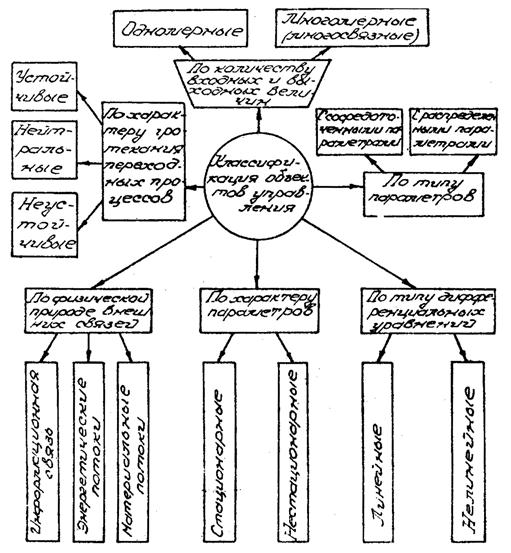
Рис. 2. Классификация объектов управления.
Многомерные объекты, как правило, представляют собой многосвязанные системы, в которых имеется несколько регулируемых величин, связанных между собой в том смысле, что изменение какой-либо из них вызывает изменение других.
Характерными примерами объектов многосвязанного регулирования могут служить: паровой котел, где регулируемыми величинами являются температура, давление пара и уровень воды; турбореактивный двигатель, в котором регулируются скорость вращения и температура газа на выходе турбины. В данных примерах корреляция (взаимовлияние) между отдельными регулируемыми величинами обусловлена естественными (внутренними) свойствами объектов. Более сложная задача многосвязанного регулирования возникает при автоматизации производственных процессов. Взаимовлияние между отдельными регулируемыми величинами в этой группе, как правило, обусловлено технологическими факторами. Примером здесь могут служить системы автоматического управления частотой вращения электроприводов валков и зазором между ними в станах холодной и горячей прокатки. Обе эти системы управления связаны между собой через прокатываемую полосу, образую сложную многосвязанную систему.
К многомерным системам также могут быть отнесены энергосистемы, ректификационные колонны в нефтехимической и газовой промышленности и многие другие. Не будет преувеличением утверждение, что теория многосвязанного регулирования является теоретической основой при автоматизации многих производственных и технологических процессов.
Внешние связи объектов со средой могут иметь различную физическую природу, обусловленную внутренней структурой объекта. Причем связи могут быть односторонними и двусторонними. Для подавляющего большинства реальных объектов характерны двусторонние информационно-энергетические связи или информационные связи с материальными потоками, так как в процессе любого управления объектом необходим информационный обмен между устройством управления и объектом для управления энергетическими или материальными потоками в самом объекте. Внутренняя структура объектов раскрывается при изучении этих элементов и описывающих эти элементы количественных соотношений. Параметры (от греч. parametron – отмеривающий) элементов системы характеризуют основные свойства этих элементов (например, сопротивление, индуктивность, емкость, коэффициент усиления, теплоемкость, инерционное запаздывание, момент трения, момент инерции и т.д.).
По типу параметров объекты делятся на объекты с сосредоточенными и с распределенными параметрами. Большинство технологических объектов имеют распределенные параметры (теплообменные агрегаты, теплоэнергетические установки, аппараты химической промышленности и другие). Однако для целей более простого математического описания распределенностью их параметров иногда пренебрегают и рассматривают приближенно, как объекты с сосредоточенными параметрами. Данный подход справедлив далеко не всегда, так как есть группа объектов, которые всегда необходимо рассматривать как объекты с распределенными параметрами. К таким объектам относятся: железнодорожная сортировочная горка, производственный участок, экологическая система, нефтеносный пласт и другие.
По типу параметров все объекты делятся на стационарные и нестационарные. Условия объектов часто оказываются крайне неблагоприятными: смена окружающей температуры, давления, влажности, колебание питающего напряжения и т.д. Все это приводит к дрейфу параметров объекта (временному, температурному и случайному). Поэтому практически все объекты обладают нестационарными параметрами. Однако если на определенном интервале наблюдения параметры объекта не выходят за пределы допустимых значений, то объект приближенно можно рассматривать со стационарными параметрами. Интервал наблюдения и допустимые значения отклонения параметров определяются конкретными условиями, исходя из целей автоматизации.
За основу классификации могут быть взяты количественные отношения между элементами объекта и между объектом и внешней средой, описываемые различными уравнениями (алгебраическими, дифференциальными и т.д.), позволяющие проводить математический анализ физических явлений в объекте.
По типу дифференциальных уравнений, описывающих количественные соотношения в объектах, последние делятся на линейные и нелинейные. Объект можно считать линейным, если в нем существует однозначная пропорциональная (линейная) зависимость выходных величин от управляющих и возмущающих воздействий, т.е. « » в формуле (1) представляет собой линейную функцию или функционал. В природе линейных объектов не существует. Все объекты нелинейные, так как имеют зоны нечувствительности, зоны насыщения, неоднозначность (гистерезис) и т.д. Однако в ряде случаев объект можно рассматривать в линейном приближении, применяя соответствующие правила линеаризации. Допустимость линеаризации объекта определяется конкретными условиями его работы (например, при малых отклонениях на линейном участке характеристики).
» в формуле (1) представляет собой линейную функцию или функционал. В природе линейных объектов не существует. Все объекты нелинейные, так как имеют зоны нечувствительности, зоны насыщения, неоднозначность (гистерезис) и т.д. Однако в ряде случаев объект можно рассматривать в линейном приближении, применяя соответствующие правила линеаризации. Допустимость линеаризации объекта определяется конкретными условиями его работы (например, при малых отклонениях на линейном участке характеристики).
В основе классификации объектов могут лежать причинно-следственные связи между окружающей средой и объектом и между его элементами. Благодаря этим связям происходит процесс передачи во времени информации, энергии, вещества от одного элемента объекта к другому или от окружающей среды к объекту и наоборот. В реальных объектах выявление причинно-следственных связей представляет большие трудности, так как процессы и явления, например в многосвязанные объектах, зависят от многих причин в разной степени, а сами следствия могут выступать как причины, воздействующие на явления, которые в прошлом были причиной появления их самих. Частных случаем причинно-следственных связей в технике являются переходные процессы, представляющие собой реакцию объектов управления на ступенчатые входные управляющие или возмущающие воздействия. По характеру протеканию переходных процессов объекты делятся на устойчивые (с самовыравниванием), нейтральные и неустойчивые.
В устойчивых объектах при подаче на их вход ступенчатого управляющего сигнала выходная величина с течением времени стремится к установившемуся значению (нагреватели; теплообменные агрегаты; двигатели, если за их выходную величину принята частота вращения ротора; электрические цепи  ,
,  ,
,  и многие другие). Отличительной особенностью этих объектов является то, что после снятия входного воздействия их выходная величина возвращается к прежнему или близкому к нему значению.
и многие другие). Отличительной особенностью этих объектов является то, что после снятия входного воздействия их выходная величина возвращается к прежнему или близкому к нему значению.
В нейтральных объектах после приложения ступенчатого входного сигнала выходная величина неограниченно возрастает во времени, а после прекращения входного сигнала никогда не возвращается к прежнему значению, принимая новое установившееся состояние. Примерами таких объектов являются объекты, обладающие интегрирующими свойствами (суммирование и запоминание). К ним относятся: резервуары, если за их выходную величину принят объем жидкости; двигатели, если за их выходную величину принят угол поворота ротора; интегрирующие активные и пассивные  - цепи; и другие.
- цепи; и другие.
В неустойчивых объектах после приложения ступенчатого входного воздействия выходная величина неограниченно возрастает во времени, а после снятия входного воздействия продолжает неограниченно возрастать. Примерами таких объектов могут служить устройства, в которых протекают лавинообразные процессы или цепные реакции (аппараты химической промышленности с лавинообразными цепными реакциями, энергосистема в неустойчивых режимах и другие).
Существуют и другие классификационные признаки, взятые за основу при классификации объектов автоматизации. Например, по наличию исходной (априорной) информации можно выделить следующие группы объектов:
- уравнения, описывающие их, полностью известны (вплоть до значения коэффициентов);
- вид описывающих их уравнений известен, а численные значения коэффициентов – нет;
- конкретный вид уравнений и численные значения параметров неизвестны, но имеется некоторая априорная информация (например, объект линеен);
- относительно которых отсутствуют какие-либо априорные сведения (объект типа «черный ящик»).
Из краткого перечня классификационных признаков видно, что каждый признак в отдельности раскрывает только одно какое-либо свойство объекта и не может служить его полной характеристикой. Зачастую, в процессе классификации сложных объектов автоматизации, оказывается трудно четко разграничить их отдельные признаки. В этом случае необходимо исходить из целей автоматизации и определения тех данных (характеристик) объекта, которые необходимы для определения оператора управления. В качестве примера ниже приводится классификация некоторых типов объектов автоматизации.
Первый объект - электрический двигатель постоянного тока с параллельным возбуждением, с якорным управлением и глубоким регулированием частоты вращения. Изучения статических, электромеханических, переходных характеристик двигателя, его свойств, конструкции и условия работы позволяют весьма приближенно рассматривать его как линейный устойчивый одномерный стационарный объект с сосредоточенными параметрами.
Второй объект – ректификационная колонна для разделения многокомпонентной смеси. Для определения оптимального оператора управления всестороннее изучение статических, динамических, эксплутационных и экономических характеристик колонны позволяет приближенно рассматривать ее как нелинейный устойчивый многосвязный объект с распределенными параметрами.
В заключение необходимо отметить, что существенную помощь в классификации объектов оказывает их математическое описание.
Лекция 4
Глубокий и всесторонний анализ объектов с управленческой точки зрения является необходимым условием успешного решения задач автоматизации. Данный анализ проводится с целью определения качественных показателей и количественных характеристик объектов для составления их математической модели, т.е. идентификации. В ГОСТ 20913-75 «Автоматизированные системы управления технологическими процессами. Стадии создания» приводится следующее определение идентификации: «Идентификацией называется определение параметров и структуры математической модели, обеспечивающих наилучшее совпадение выходных координат модели и процесса при одинаковых воздействиях». Отсюда следует, что процесс идентификации содержит следующие этапы:
1. Выбор структуры модели на основании имеющейся априорной информации об исследуемом объекте.
2. Выбор критерия близости объекта и модели, основанный на специфике задачи.
3. Определение параметров модели, квазиоптимальных с точки зрения выбранного критерия близости.
Полученное математическое описание объекта должно отражать объективные закономерности, действующие в реальном объекте, с точностью, определяемой требованиями и спецификой решаемой задачи управления. От этого зависит качество управления и в конечном итоге - экономические показатели производства.
Математическое описание объектов может быть представлено в виде формул, таблиц, графиков, алгоритмов и т.д., количественно описывающих статические, временные, частотные, метрологические и другие связи между выходными величинами объекта и его входными величинами.
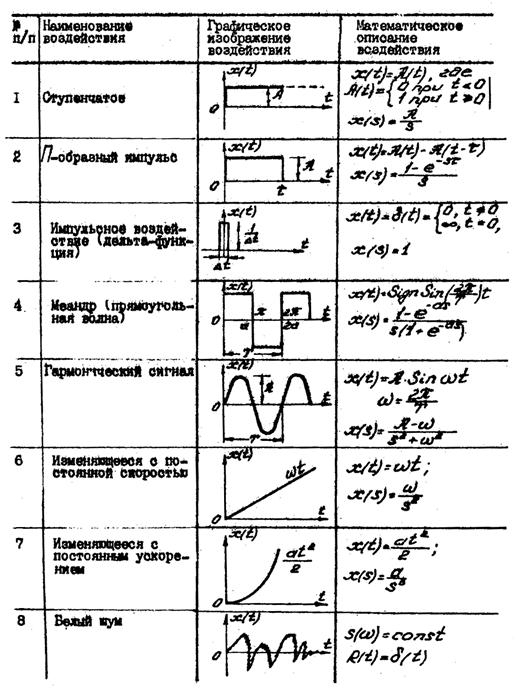
Количественные характеристики объекта могут быть получены различными методами, из них наиболее распространенны: аналитические, экспериментальные и комбинированные. Сущность аналитических методов состоит в том, что на основании глубокого знания физических законов функционирования объекта, его конструкции, условий эксплуатации и т.д. определяется его структура и составляются все необходимые количественные соотношения, описывающих статику и динамику объекта. Практически для большинства объектов априорной информации оказывается недостаточно для их идентификации, поэтому прибегают к экспериментальной проверке модели с целью ее уточнения. Экспериментальные методы идентификации объектов делятся на активные и пассивные. При активных методах в процессе эксперимента на вход объекта подаются специальные воздействия (табл. №1). Пассивные методы используют текущую информацию об объекте, получаемую в режиме его нормального функционирования.
Наиболее полная информация об объектах может быть получена при использовании аналитических и экспериментальных методов. Проектировщикам часто приходится сталкиваться с задачами идентификации объектов управления различной физической природы и сложности, прибегая к экспериментальным методам исследования. Поэтому вначале необходимо ознакомиться с логическими предпосылками, на которых базируется планирование эксперимента. К настоящему времени накоплен большой опыт применения эксперимента в самых различных областях человеческой деятельности, позволяющий определить критерии оптимальности в планировании, проведении и обработке результатов эксперимента. Работы по идентификации объектов ориентировочно рекомендуется проводить в такой последовательности:
- определить главную цель управления объектом;
- провести классификацию объекта;
- выбрать метод идентификации;
- составить подробный план проведения эксперимента;
- выбрать аппаратуру и технические средства для проведения эксперимента;
- определить квалификацию необходимого инженерно-технического персонала;
- определить методы и способы обработки информации и конечную документацию.
По каждому пункту имеется большое количество публикаций, поэтому в пределах одной главы невозможно раскрыть специфику всех исследований, определяемых «природой» объекта.
Из современных тенденций при идентификации объектов необходимо указать на широкое применение вычислительной техники для математического моделирования, как самих объектов, так и для обработки результатов эксперимента. При этом моделирование сложных объектов связано с обработкой больших информационных потоков, в которых необходима оценка качественно-количественных характеристик текущей информации. Аппаратура управление, контроля и регистрации обладает ограниченной пропускной способностью, что приводит к необходимости выделения из всего потока информации той части, которая определяет наибольшую ценность. Наиболее перспективным следует считать создание автоматических идентификаторов, формирующих по измеряемым значениям  ,
,  ,
,  ,
,  модель объекта непосредственно в процессе его работы. На основе таких идентификаторов можно создавать самые совершенные – адаптивные системы управления.
модель объекта непосредственно в процессе его работы. На основе таких идентификаторов можно создавать самые совершенные – адаптивные системы управления.
Ниже рассматриваются экспериментальное определение некоторых характеристик объекта.
Таблица №1. Наиболее распространенные виды воздействий
при исследовании объектов управления.