 2014-02-13
2014-02-13 1851
1851Определение: Связью для твердого тела или материальной точки называют материальные объекты (тела или точки), которые ограничивают свободу перемещения твердого тела или материальной точки.
Всякую связь можно отбросить и заменить силой, реакцией связи (в простейшем случае) или системой сил (в общем случае).
Реакции связей - пассивные силы (в отличии от заданных, активных сил).
Если соприкосновение происходит не в одной точке, а по некоторой поверхности, то реакция - система распределенных по поверхности сил, которые в некоторых случаях удается заменить одной равнодействующей.
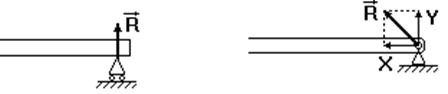
Типовые виды связей.
а) опора б) цилиндрический (плоский) шарнир
в) сферический (шаровой) шарнир г) жесткая (плоская) заделка
д) гибкие связи (нити, тросы, канаты) - реакции касательны к нити
е) шарнирный стержень – реакция направлена вдоль стержня

Простейшие теоремы статики.
1. Теорема о переносе силы вдоль линии действия.


Сила, приложенная к твердому телу, есть вектор скользящий. В деформируемом теле силу нельзя переносить вдоль линии действия.
Если твердое тело под действием трех сил, две из которых пересекаются в одной точке, находится в равновесии, то линии действия таких трех сил пересекаются в одной точке.
Обратная теорема неверна.
Теорема о трех силах позволяет иногда определить линию действия неизвестной силы.
Системой сходящихся сил (или пучком сил) называют такую систему сил, линии действия которых пересекаются в одной точке - центре пучка. Сходящиеся системы сил могут быть пространственными и плоскими.

Для плоской системы сил обычно берут ось Z перпендикулярно плоскости, в которой лежат силы, т.е. 
Условия равновесия системы сходящихся сил.
Для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым, т.е. равнодействующая была бы равна нулю.
 - для произвольной системы сил.
- для произвольной системы сил.
 - для плоской системы сходящихся сил.
- для плоской системы сходящихся сил.
Проецирование силы: 
 |    |
Лекция 2 (статика)
«Момент силы относительно точки и оси, пара сил»
Момент силы относительно точки и оси
1. Алгебраический момент силы относительно точки. Используется при рассмотрении плоской системы сил. Алгебраическим моментом силы относительно точки называют произведение модуля силы на плечо силы относительно этой точки, взятое со знаком плюс или минус. Плечом h силы F называют кратчайшее расстояние между этой точкой и линией действия силы. Знак зависит от направления "вращения" тела относительно точки: Q - (+), P - (-).


2. Векторный момент силы относительно точки. Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо силы относительно этой точки. Векторный момент направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть "стремление" силы вращать тело против движения часовой стрелки.

Векторный момент силы относительно точки не меняется при скольжении силы по линии действия и равен нулю, если линия проходит через точку О.



где  обозначает векторное произведение векторов
обозначает векторное произведение векторов  и
и  .
.
Косинусы углов a,b,g суть проекции на оси координат единичного вектора, направленного по вектору момента M0.
 3. Момент силы относительно оси. Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью. Знак определяется направлением вращения (Q - (+), P - (-)).
3. Момент силы относительно оси. Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью. Знак определяется направлением вращения (Q - (+), P - (-)).
Свойства: а) Mz=0, если сила параллельна ост Oz
б) Mz=0, если линия действия пересекает ось Oz
Короче говоря, момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
4. Связь момента силы относительно оси с векторным моментом силы относительно точки на оси.

Треугольник OA1B1 является проекцией треугольника OAB на плоскость П. Из стереометрии известно, что площадь проекции плоской фигуры равна площади проецируемой фигуры, умноженной на косинус угла между плоскостями, в которых расположены эти фигуры (или косинус угла между нормалями к плоскостям этих фигур, т.е.  и
и  ).
).

Окончательно: момент силы относительно оси равен проекции на эту ось векторного момента силы относительно любой точки на оси.
Тогда имеем:
5. Пара сил и алгебраический момент пары сил.
Парой сил называют систему двух равных по модулю параллельных сил (не лежащих на одной прямой), направленных в противоположные стороны.
 Обычно пару сил прилагают к телу, которое должно вращаться.
Обычно пару сил прилагают к телу, которое должно вращаться.
Пару сил нельзя заменить одной силой, т.е. она не имеет равнодействующей и является такой системой сил, которую упростить нельзя.
Пара сил, действующая на твердое тело, характеризуется плоскостью действия (сила – линией действия)

