2014-02-13
2014-02-13 445
445Механической системой называется множество материальных точек, выделенных для изучения и объединенных по некоторому принципу (Солнечная система, механические устройства и механизмы).
1Свободная точка, не имеющая связей, имеет три степени свободы, т.е. для описания ее положения необходимо задать три параметра x(t), y(t), z(t).
3. На свободную точка наложена одна связь – мы удерживаем ее с помощью невесомого стержня длины R. Один конец стержня шарнирно закреплен в точке О. В этом случае координаты точки обязаны подчиняться уравнению x2 + y2 + z2=R и мы говорим, что на точку наложена стационарная удерживающая связь, у нее осталось две степени свободы (точка может находиться на поверхности сферы радиуса R и ее положение можно описать с помощью двух параметров, например двух углов).
В общем случае мы имеем механическую систему из n точек, каждая точка имеет три степени свободы, а вся механическая система, если на нее не наложено никаких связей, имеет 3n степеней свободы.
Ограничения на движение точек системы (связи) заданы независимыми между собой уравнениями:
fj(x1,y1,z1…..xn,yn,zn) = 0 (j = 1,2….s)
Если число связей s равно 3n, то эти уравнения определяют 3n координат, система может иметь одно или несколько определенных положений и перемещаться не будет. Для возможности перемещения системы должно выполняться условие k = 3n – s > 0. Число k называют числом степеней свободы системы.
Пусть к материальной точке М приложена сила F. Предположим, что точке М сообщено некоторое бесконечно малое не противоречащее уравнениям связей перемещение  . Это перемещение назовем возможным в отличие от действительного
. Это перемещение назовем возможным в отличие от действительного  , которое точка совершает на самом деле под действием приложенных сил.
, которое точка совершает на самом деле под действием приложенных сил.
Элементарной работой силы F на возможном перемещении называют величину

У нас есть система точек Mi с координатами (xi,yi,zi) и действующие на них силы  (i=1,2…n). Точки системы стеснены некоторыми связями. По аксиоме о связях их действие можно заменить действием сил реакций
(i=1,2…n). Точки системы стеснены некоторыми связями. По аксиоме о связях их действие можно заменить действием сил реакций  (i=1,2…n). То есть, добавив к силам Fi все реакции Ri систему точек можно мыслить свободной от связей, вызывающих реакции Ri.
(i=1,2…n). То есть, добавив к силам Fi все реакции Ri систему точек можно мыслить свободной от связей, вызывающих реакции Ri.
Определение. Идеальными называются связи, работа сил реакций  (i=1,2…n) которых на любых возможных при этих связях перемещениях равна нулю, то есть
(i=1,2…n) которых на любых возможных при этих связях перемещениях равна нулю, то есть

Сформулируем основной принцип аналитической статики для систем с идеальными удерживающими стационарными связями. Система точек находится в состоянии равновесия, значит сумма проекций сил на все оси декартовой системы координат должны быть равны нулю:
Fix+Rix=0; Fiy+Riy=0; Fiz+Riz=0; (I=1,2…n)
Отсюда мы можем определить Rix,Riy,Riz и подставив в уравнение определения для идеальных связей получить выражение:

справедливое для произвольных возможных перемещений в положении равновесия рассматриваемой механической системы. Это и есть необходимое и достаточное условие равновесия механической системы, которое называется принципом возможных перемещений. Принцип возможных перемещений может быть взят за основу всех положений статики взамен набора аксиом, которые мы использовали с самого начала для вывода наших результатов.
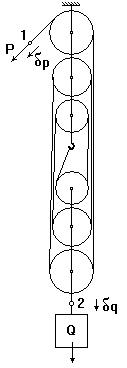
Пример 1. Рассмотрим полиспаст, одно из простейших механических устройств, которое давно известно человечеству, как и устройства вроде рычага и клина.
С точки зрения аналитической статики полиспаст представляет собой механическую систему, состоящую из двух точек 1 и 2, к которым приложены силы P и Q, все прочее относится к реализации связи между этими двумя точками.
Для нашего случая принцип возможных перемещений записывается так:
Pdp + Qdq = 0,
Здесь dp и dq – возможные перемещения точек 1 и 2, которые не являются независимыми. Легко установить соотношение dp = -6 dq и после подстановки в вышеприведенную формулу получить:
P = Q/6.
Это означает, что с помощью приведенной на рисунке конструкции полиспаста для удержания в равновесии груза весом Q необходимо приложить в 6 раз меньшую силу P.
 Пример 2. Рассмотрим гибкую однородную тонкую тяжелую нить, закрепленную в точках A и B, длина нити – l
Пример 2. Рассмотрим гибкую однородную тонкую тяжелую нить, закрепленную в точках A и B, длина нити – l
l2 > x2B + y2B
Нить нерастяжимая, ds вдоль длины нити не меняется.
f º dx2 + dy2 + dz2 – ds2 = 0
Рассматриваем плоский случай параллельных сил тяжести: dx2 + dy2 – ds2 = 0