2015-01-21
2015-01-21 629
629Даны кривошипно-ползунный механизм, длины звеньев которого – кривошипа и шатуна – LOA = L1 и LAB = L2 соответственно, и угловая скорость кривошипа w1 = const.
Определитьскорости и ускорения всех кинематических пар и центра тяжести шатуна.
Решение
Используем метод замкнутых векторных контуров (рис. 6.4).
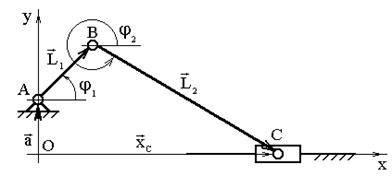
Рис. 6.4. Замкнутый векторный контур кривошипно-ползунного механизма
Рассмотрим замкнутый векторный контур OABCO. Соблюдая единообразие отсчёта углов, определяющих положение звеньев, составим векторное уравнение
 . (3)
. (3)
Спроектируем (2.4) на координатные оси Х и Y:
|
|