 2015-01-21
2015-01-21 794
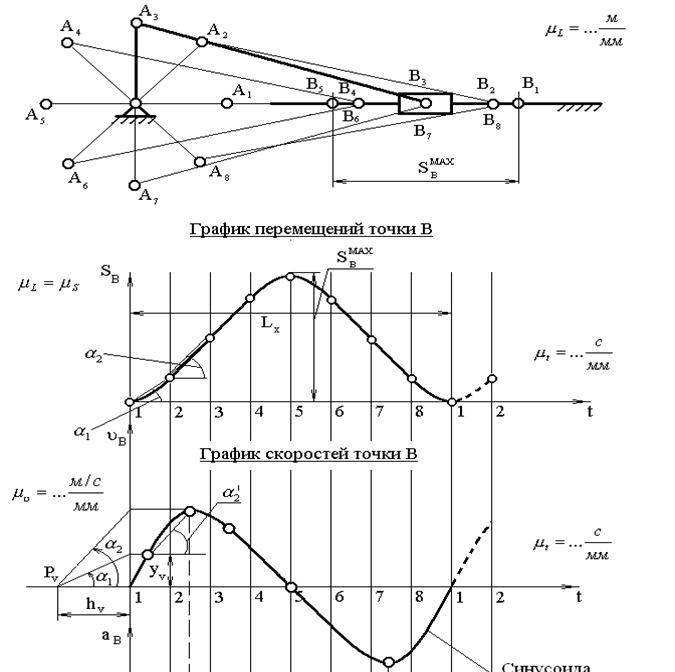
794Даны кривошипно-ползунный механизм, длины звеньев которого – кривошипа и шатуна – LOA и LAB соответственно, и угловая скорость кривошипа w1 = const.
Определитьскорости и ускорения ползуна при различных положениях кривошипа.
Решение
Выбираем масштабы длин  , м/мм, где AO – длина отрезка, мм, изображающая кривошип длиной LОА на строящемся плане механизма; эта длина выбирается произвольно с учётом того, что совмещённые планы механизма должны разместиться на отведённом месте чертежа, а сам масштаб длин был бы удобен для дальнейших расчётов.
, м/мм, где AO – длина отрезка, мм, изображающая кривошип длиной LОА на строящемся плане механизма; эта длина выбирается произвольно с учётом того, что совмещённые планы механизма должны разместиться на отведённом месте чертежа, а сам масштаб длин был бы удобен для дальнейших расчётов.
Вычисляем длину отрезка  , мм, изображающего шатун на плане механизма. При построении совмещенных планов механизма используют метод засечек (рис. 6.1).
, мм, изображающего шатун на плане механизма. При построении совмещенных планов механизма используют метод засечек (рис. 6.1).
Для построения графиков скоростей и ускорений (рис. 6.1) выбираются полюсные расстояния hu и ha, где hu – полюсное расстояние при построении графика скоростей, которое выбирается произвольной длины; рекомендуется его величину выбирать в пределах hu» 30…40 мм; ha – полюсное расстояние при построении графика ускорений; его рекомендуется принимать в пределах ha»30…40 мм.
Масштабы времени, скорости и ускорения вычисляют по формулам, вывод которых приводится ниже.
Масштаб времени можно вычислить по формуле
 ,
,
где Т – период одного оборота кривошипа, с; LX – длина отрезка между точками 1 и 1 на графике (диаграмме) перемещений, мм.
Так как период Т можно вычислить по формулам
 , или
, или  , с,
, с,
где ω1 – угловая скорость кривошипа, 1/с; n1 – частота вращения кривошипа, об/мин, то масштаб времени
 , с/мм.
, с/мм.
Масштаб скорости можно вывести из условия, что скорость исследуемой точки является производной перемещения S по времени:
 .
.
Здесь предполагается, что масштаб перемещений μs и масштаб времени μt являются постоянными величинами.
Так как  , то
, то  , отсюда
, отсюда
 ,
,  .
.
Масштаб ускорения, вывод которого аналогичен предыдущему, вычисляется по формуле
 ,
,  .
.
Для определения величины скорости или ускорения в каком-либо положении точки В необходимо длину ординаты соответствующего графика умножить на масштаб mv или ma соответственно.
|


|
|
|
|
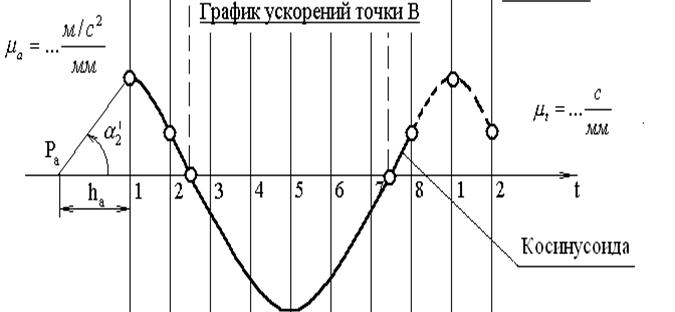
Рис. 6.1. Планы положений механизма, графики перемещений, скоростей и ускорений
3. Графоаналитический метод кинематического анализа
Графоаналитический метод называют методом планов скоростей и ускорений.
Задача о положениях решается графическим методом, то есть построением нескольких совмещённых планов механизма в выбранном масштабе длин.
Задачи о скоростях и ускорениях решаются построением планов скоростей и ускорений звеньев механизма при определённых (заданных) положениях ведущего звена на основе заранее составленных векторных уравнений скоростей и ускорений звеньев механизма.
Преимущество этого метода по сравнению с графическим в том, что он менее трудоёмок, так как позволяет определять скорости и ускорения (их величину и направление) на одном плане скоростей или плане ускорений для множества точек механизма.
Недостатком метода является то, что методом планов скоростей и ускорений определяются кинематические параметры для каждого конкретного положения механизма.
Построение планов скоростей и ускорений проводится в порядке, определенном структурной формулой механизма: начиная с первичного механизма, затем последовательно рассматривая присоединенные к нему структурные группы.








