 2015-01-21
2015-01-21 1813
1813Даны кривошипно-ползунный механизм в определенном положении, длины звеньев которого – кривошипа и шатуна – LOA и LAB соответственно, и угловая скорость кривошипа w1 = const.
Определитьскорости и ускорения всех кинематических пар и центра тяжести шатуна.
Решение
Последовательность решения задачи:
1. Строится план механизма (рис. 6.2) в выбранном масштабе длин:
 , м/мм,
, м/мм,
где LOA – длина кривошипа, м; AO – длина отрезка, изображающего кривошип на плане механизма, мм.
Для построения плана механизма остальные длины звеньев и координаты неподвижных точек шарнирного четырехзвенника (рис. 2.2) переводятся масштабом длин mL в отрезки:
AB = LAB/mL, мм,
AS2 = LAS2/mL, мм,
2. Составляются векторные уравнения линейных скоростей отдельных точек, принадлежащих звеньям механизма.
V В = V А + V ВА, (1)
где V А = V АО – скорость точки А, которая равна скорости точки А относительно оси вращения кривошипа точки О; V ВА – вектор скорости точки В относительно А; имеет направление, перпендикулярное прямой АВ на плане механизма; V В – вектор полной (абсолютной), скорости ползуна 3; должен быть параллельным направлению движения ползуна.
Строится план скоростей механизма – это не что иное, как графическое изображение на чертеже векторного уравнения (1) и в каком-либо масштабе.
План скоростей желательно строить рядом с планом механизма (рис. 6.2). Предварительно рассчитывается скорость точки А кривошипа:
 , м/с.
, м/с.
Затем выбирается масштаб плана скоростей mu по соотношению
 ,
,  ,
,
где V A – скорость точки А, м/с; PVa – длина отрезка, изображающего на будущем плане скоростей скорость V A, выбирается произвольной длины в мм; при выборе желательно придерживаться условий: во-первых, план скоростей должен размещаться на отведённом месте чертежа, во-вторых, численное значение масштаба mv должно быть удобным для расчётов (mv должно быть круглым числом).
После этого можно приступать к построению плана скоростей механизма. Его следует проводить в последовательности, соответствующей написанию векторного уравнения (1).
Для построения плана скоростей сначала из полюса плана Рv (рис. 6.2) проводится вектор скорости точки А относительно О – V А, т.е. векторный отрезок Рva. Затем через точку а проводится перпендикуляр к прямой АВ плана механизма и через полюс Рv – прямая, параллельная движению ползуна 3. На пересечении этих двух прямых получается точка b. Направления векторов скоростей V В и V ВА обозначают стрелками.
Скорость точки S 2 определяют по теореме подобия: отрезки относительных скоростей на плане скоростей образуют фигуру, подобную фигуре соответствующего звена на плане механизма.
Так, точка S2, принадлежит шатуну 2 и расположена на середине отрезка АВ. Используя теорему подобия, на отрезке ab плана скоростей находят его середину (точка S2), которая, будучи соединенной с полюсом Рv, даст вектор V S2, изображающий абсолютную (полную) скорость точки S2.
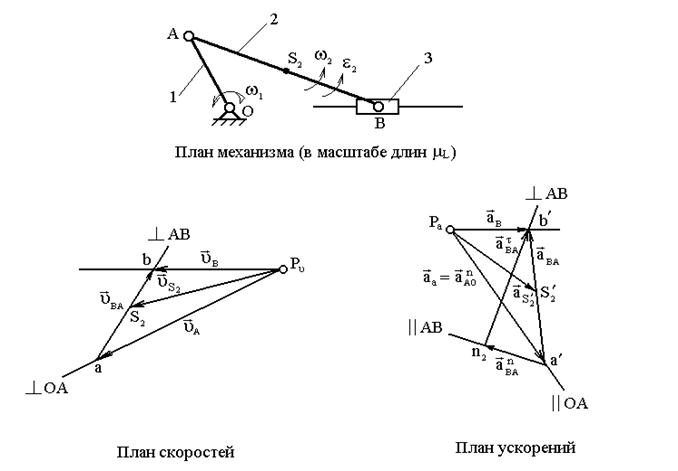
Рис. 6.2. Построение планов скоростей и ускорений кривошипно-ползунного механизма
Рассчитаем величину линейных скоростей и угловую скорость шатуна:
 , м/с,
, м/с,
 , м/с,
, м/с,
 , м/с,
, м/с,
 , с-1.
, с-1.
Направление вектора угловой скорости шатуна w 2 определяется следующим образом. Вектор скорости V ВА условно переносится в точку В плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлена угловая скорость w 2 шатуна.
3. Последовательность построения плана ускорений рычажного механизма аналогична построению плана скоростей.План ускорений кривошипно-ползунного механизма строят после того, как будет составлено векторное уравнение ускорений шатуна, учитывая, что он совершает сложное движение:
а В= а А + а nВА+ а tВА,
где а А – ускорение точки А; его величину и направление можно определить, используя векторное уравнение ускорения точки А относительно оси О вращения кривошипа:
а А= а О + а АО,
причём ускорение точки А относительно О можно разложить на две составляющие – нормальное ускорение а nАО и тангенциальное а tАО, т.е.
а АО = а nАО+ а tАО.
Так как точка О неподвижна и ускорение её равно нулю (а О = 0 и а tАО = 0 при условии, что угловая скорость вращения кривошипа постоянна: w1 = const и его угловое ускорение e1 = 0), то векторное уравнение ускорения точки А можно записать в виде
а А= а nАО.
Величина нормальной составляющей ускорения (нормальное ускорение) рассчитывается по формуле

(его вектор направлен по радиусу вращения кривошипа от точки А к точке О).
Затем вычисляется нормальное ускорение точки В относительно А по формуле

(его вектор направлен от В к А).
После выбора масштаба плана ускорений по формуле 
величина нормального ускорения a nBA переводится этим масштабом в векторный отрезок длиной
 , мм.
, мм.
Затем строится план ускорений (см. рис. 6.2). Из произвольно выбранного полюса Ра параллельно отрезку ОА плана механизма проводится вектор ускорения a nAО, длина которого  была выбрана произвольно при расчёте масштаба mа. Из конца этого вектора (точки
была выбрана произвольно при расчёте масштаба mа. Из конца этого вектора (точки  ) проводится вектор ускорения a nBA длиной
) проводится вектор ускорения a nBA длиной  , который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой через полюс Ра параллельно линии движения ползуна 3. Полученная точка их пересечения b' определяет длины векторов ускорений a BA и a B.
, который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой через полюс Ра параллельно линии движения ползуна 3. Полученная точка их пересечения b' определяет длины векторов ускорений a BA и a B.
Для нахождения величины ускорения точки S2, принадлежащей шатуну, можно применить теорему подобия: отрезки полных относительных ускорений на плане ускорений образуют фигуру, подобную соответствующей фигуре звена на плане механизма. При этом необходимо на векторе, изображающем на плане ускорений относительное ускорение a BA, найти соответствующую точку S2', делящую отрезок a'b' в той же пропорции, что и точка S2 делит отрезок АВ на плане механизма.
Угловое ускорение шатуна вычисляется по формуле
 , с-1,
, с-1,
где n2b' – длина вектора на плане ускорений, изображающего тангенциальное ускорение а  .
.
Для определения направления вектора углового ускорения шатуна e 2 необходимо вектор тангенциального ускорения а условно перенести в точку В плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлено ускорение e 2 шатуна.

