 2015-01-30
2015-01-30 1076
1076Рассмотрим методы отыскания экстремума функции R(x) без активных ограничений. Активными принято называть такие ограничения, на границе которых находится решение. Величина шага D х в соотношении
xi+1 = xi +Dxi
вычисляется с использованием градиента целевой функции R(x), т.е.
Dxi = ¦(gradR(xi)),
при этом шаг может определяться с использованием градиента в одной (текущей) или в двух (текущей и предыдущей) точках. Направление градиента, как известно, показывает направления наискорейшего возрастания функции, а его модуль — скорость этого возрастания.
Вычисление градиента предполагает непрерывность функции многих переменных
Поисковые методы оптимизации содержат задаваемые параметры, которые существенно влияют на эффективность поиска, вследствие чего один и тот же метод может дать совершенно различные траектории поиска. Поэтому для всех методов, рассматриваемых далее, на рис.3.5 приводится лишь одна из возможных траекторий.
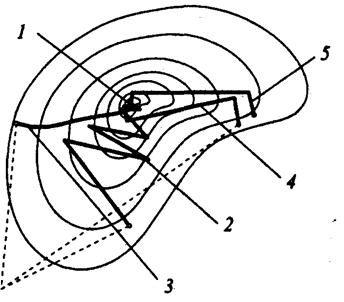
Рис. 3.5. Иллюстрация траекторий поиска минимума функции градиентными
методами:
1 — оптимум; 2 -— траектория метода градиента; 3 — траектория метода
тяжелого шарика; 4 — траектория метода наискорейшего спуска;
5 — траектория метода сопряженных градиентов; 
Кроме того, для всех приведенных траекторий выбраны различные начальные условия, с тем, чтобы не загромождать построения. На этом и последующих рисунках зависимость R(x 1, x 2 ) приведена в виде линий уровня на плоскости в координатах x 1 - x 2.








