Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические.
Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки,
рэ1 = m1I12r1.
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью
Рэм = Р1 - (рc1 + рэ1).
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора
рэ2 = m2I22r2 = m1I’22r’2.
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью.
Р’2 = Рэм - рэ2.
Таким образом, полная механическая мощность
Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s].
Выполнив несложные преобразования, получим
рэ2[(1-s)/s] = Рэм - рэ2 и рэ2= sРэм,
т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях.
Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают.
Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рд потерь
Р2 = Р’2 - (рмех + рд).
Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
Р2 = Р1 - ∑р,
где ∑р – сумма потерь в асинхронном двигателе,
∑р = рс1 + рэ1 + рэ2+ рмех + рд.
Коэффициент полезного действия асинхронного двигателя
η = Р2/ Р1 = 1 - ∑р/ Р1.
Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).
| 56. Двухклеточные и глубокопазные асинхронные двигатели Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом |
| Необходимость обеспечения высоких пусковых моментов без применения пусковых резисторов привела к созданию. двигателей с короткозамкнутым ротором, в которых использовано явление вытеснения тока в стержнях при пуске, когда при s = 1, /а =* fx. Как известно, при вытеснении тока в верхнюю часть проводника происходит уменьшение его используемого сечения, что эквивалентно повышению активного сопротивления стержня; кроме того, вытеснение тока приводит к уменьшению индуктивного сопротивления, так как уменьшается общая проводимость пазового магнитного потока рассеяния. Все это создает, как показано в п. 1, условия для получения высокого пускового момента. Этими свойствами обладают двигатели с двухклеточным и глубокопазным роторами.
Двигатель с двойной «беличьей клеткой». Ротор имеет две короткозамкнутых обмотки (рис. 1, а). Наружная клетка 1 является пусковой; ее стержни имеют малое поперечное сечение и изготавливаются из марганцовистой латуни или бронзы, поэтому активное сопротивление этой клетки Г2п достаточно велико. Внутренняя клетка 2 является основной (рабочей); она изготавливается из медных стержней большего поперечного сечения, поэтому ее активное сопротивление Ггр сравнительно мало. В некоторых случаях обе клетки объединяют и выполняют литыми из алюминия.
Индуктивные сопротивления клеток определяются значением потока рассеяния Фграс, сцепленного с их стержнями. Поскольку пусковая клетка расположена ближе к поверхности ротора, сцепленный с нею поток рассеяния невелик и, следовательно, ее индуктивное сопротивление Х2п мало. У рабочей же клетки потокосцепление рассеяния велико, значит, она обладает большим Х2Р. Соотношение между хгп и х2р, а также увеличение последнего обеспечиваются соответствующим выбором, ширин и высот шлица в пазу над верхней клеткой и щели между стержнями.
Обе клетки в электрическом отношении включены параллельно, поэтому токи между ними распределяются обратно пропорционально их полным сопротивлениям:
 При пуске (s = 1) индуктивные сопротивления по сравнению с активными чрезвычайно велики; поэтому ток ротора в основном проходит по верхней пусковой клетке, так как Хщ Хгр. Но у этой же клетки велико г2п, что приводит к появлению большого пускового момента.
По мере разгона ротора уменьшаются скольжение s и частота fa = /iS. Вместе со скольжением и частотой, уменьшается индуктивное сопротивление хгр, и ток постепенно переходит из пусковой клетки в рабочую. 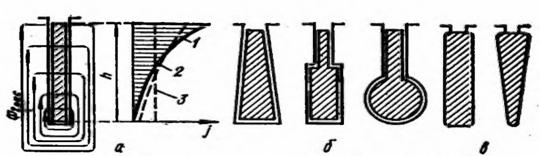 Рис. 2. Распределение плотности тока по высоте стержня глубокопазного ротора (а) и различные формы сечений стержней (б, в) Рис. 2. Распределение плотности тока по высоте стержня глубокопазного ротора (а) и различные формы сечений стержней (б, в) | Итак, в двухклеточном роторе ток в начальный момент пуска вытесняется в верхнюю (пусковую) клетку, создающую большой пусковой момент; по мере разгона ток постепенно проникает в нижнюю (рабочую) клетку, а по окончании пуска практически полностью протекает по ней.
На рис. 1, б показаны механические характеристики пусковой и рабочей клеток, а также результирующая кривая, представляющая собой сумму двух предыдущих (М = в Мп -+- Alp).
У двухклеточных двигателей большой мощности кратность начального пускового момента = 1,7 -- 2 при существенно меньшем, чем у обычных двигателей, броске пускового тока: Лпуск/Лном = 4 5 (ср. с пусковыми параметрами обычных двигателей).
Глубокопазный двигатель. Можно показать, что эффект вытеснения тока в верхнюю часть проводника, когда s — 1 и /2 = /х = 50 Гц, начинает проявляться у медного проводника при его высоте h > 12 мм, а у алюминиевого — при h > 16 мм. Например, активное сопротивление медного проводника при h = 50 мм в 5 раз больше, а индуктивное — в 3,33 раза меньше в начальный момент пуска, чем в рабочем режиме при Shom — 0,01 0,03. Поэтому «беличью клетку» глубокопазных двигателей выполняют из узких и высоких (30—60 мм) стержней.
Распределение плотности тока по высоте стержня h в момент пуска показано на рис. 2, а кривой /. Можно представить себе, что при пуске работает только верхняя часть стержня, его активное сопротивление увеличивается, а индуктивное — уменьшается, и создаются условия для возникновения большого пускового момента.
При разгоне с уменьшением частоты fa ток все более равномерно распределяется по высоте стержня (кривая 2 на
ряс. 2, а)'. Происходят как бы плавное увеличение рабочего сечения проводника и уменьшение его активного сопротивления.
В номинальном режиме явления вытеснения тока нет, активное сопротивление стержня становится минимальным, плотность тока равномерно распределяется по высоте проводника (линия 3 на рис. 2, а).
На рис. 1, б кривая Мтл представляет механическую характеристику глубокопазного двигателя. Она занимает промежуточное положение между характеристиками обычного и двух клеточного двигателей.
Существуют разновидности глубокопазных двигателей с трапециедальной, двухступенчатой и колбообразной формами стержней (рис. 2, б). Эти роторы дешевле двухклеточных, поэтому они получили большее распространение.
С целью усиления эффекта вытеснения тока при пуске в современных короткозамкнутых двигателях мощностью до 100 кВт с алюминиевой заливкой роторов пазам последних придают специально сильно вытянутую в радиальном направлении форму (рис. 2, в). |
 2015-01-30
2015-01-30 12159
12159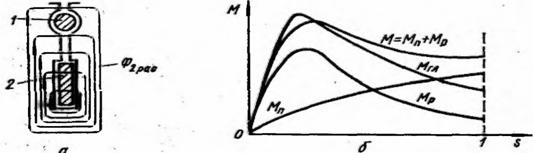 Рис. 1. Паз двух клеточного ротора (а) и
Рис. 1. Паз двух клеточного ротора (а) и 
