 2014-09-02
2014-09-02 1190
1190Для описания механического движения необходимо указать тело, относительно которого рассматривается движение – тело отсчёта (т.о.). С телом отсчёта связана система координат. Простейшей системой координат является прямоугольная декартова система  (рис.1).
(рис.1).
Совокупность тела отсчёта, системы координат и системы отсчёта времени, связанных с этим телом, по отношению к которому изучается движение (или равновесие) каких-либо других материальных точек или тел, называется системой отсчёта.
При движении материальной точки  (рис.1) конец радиус-вектора
(рис.1) конец радиус-вектора  описывает в пространстве некоторую линию.
описывает в пространстве некоторую линию.
Координаты материальной точки при её движении с течением времени изменяются и описываются системой уравнений:
 (I.1)
(I.1)
Эта система эквивалентна векторному уравнению, называемому законом движения:
 . (I.2)
. (I.2)
Уравнения (I.1) и (I.2) называются кинематическими уравнениями движения материальной точки.
Наиболее часто пользуются правой прямоугольной декартовой системой координат, изображенной на рис. 2.
|
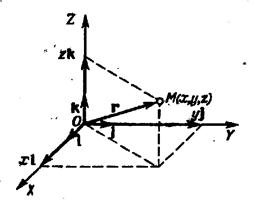
 - единичные по модулю и взаимно перпендикулярные векторы – орты системы координат, образующие ее ортонормированный базис.
- единичные по модулю и взаимно перпендикулярные векторы – орты системы координат, образующие ее ортонормированный базис.
Система координат называется правой, так как из конца третьего орта (вектора  ) вращение от первого орта (
) вращение от первого орта ( ) ко второму (
) ко второму ( ) по кратчайшему расстоянию видно происходящим против часовой стрелки, т.е. взаимная ориентация векторов () совпадает с взаимной ориентацией трех пальцев правой руки – большого, указательного и среднего, когда они расположены взаимно перпендикулярно. Из правила сложения векторов следует, что радиус-вектор точки М можно разложить по базису следующим образом:
) по кратчайшему расстоянию видно происходящим против часовой стрелки, т.е. взаимная ориентация векторов () совпадает с взаимной ориентацией трех пальцев правой руки – большого, указательного и среднего, когда они расположены взаимно перпендикулярно. Из правила сложения векторов следует, что радиус-вектор точки М можно разложить по базису следующим образом:
 ,
,
где  - координаты (компоненты) радиуса – вектора
- координаты (компоненты) радиуса – вектора  относительно базиса;
относительно базиса;
 - составляющие вектора по осям координат.
- составляющие вектора по осям координат.
Положение точки в пространстве определяется числом независимых координат, называемых числом степеней свободы.
Рассмотрим частные случаи:
- три степени свободы (
 - материальная точка свободно движется в пространстве;
- материальная точка свободно движется в пространстве; - две степени свободы (
 );
); 
 - материальная точка движется по некоторой поверхности;
- материальная точка движется по некоторой поверхности; - одна степень свободы
 ,
,  или
или  - материальная точка движется вдоль некоторой линии.
- материальная точка движется вдоль некоторой линии.
Траекторией точки называется линия, описываемая этой точкой при ее движении относительно выбранной системы отсчета. Кинематические уравнения движения точки (I.1) задают ее траекторию в параметрической форме. Параметром служит время  . Уравнение траектории точки в обычной форме, т.е. в виде двух уравнений связывающих между собой декартовы координаты точек траектории, можно получить, решая уравнения (I.1) совместно и исключая, из них параметр .
. Уравнение траектории точки в обычной форме, т.е. в виде двух уравнений связывающих между собой декартовы координаты точек траектории, можно получить, решая уравнения (I.1) совместно и исключая, из них параметр .
Например, пусть кинематические уравнения движения точки заданы в форме:
Уравнение траектории этой точки  ,
,  , т.е. точка движется в плоскости по эллиптической траектории с полуосями, равными
, т.е. точка движется в плоскости по эллиптической траектории с полуосями, равными  . В зависимости от формы траектории различают прямолинейное и криволинейное движения точки. Если траектория точки – плоская кривая, т.е. целиком лежит в одной плоскости, то движение точки называют плоским. В общем случае траектория точки представляет собой пространственную кривую.
. В зависимости от формы траектории различают прямолинейное и криволинейное движения точки. Если траектория точки – плоская кривая, т.е. целиком лежит в одной плоскости, то движение точки называют плоским. В общем случае траектория точки представляет собой пространственную кривую.
Простейшими видами механического движения являются поступательное и вращательное движения тела.
Поступательное движение – это движение, при котором любая прямая, соединяющая две произвольные точки ( и
и  ) тела, перемещается, оставаясь параллельной самой себе (рис.3).
) тела, перемещается, оставаясь параллельной самой себе (рис.3).
 |
|
Например, поступательно движется ящик письменного стола, когда его выдвигают.
 Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, перпендикулярной к плоскостям окружностей, называемой осью вращения (ОО) (рис.4).
Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, перпендикулярной к плоскостям окружностей, называемой осью вращения (ОО) (рис.4).
|








